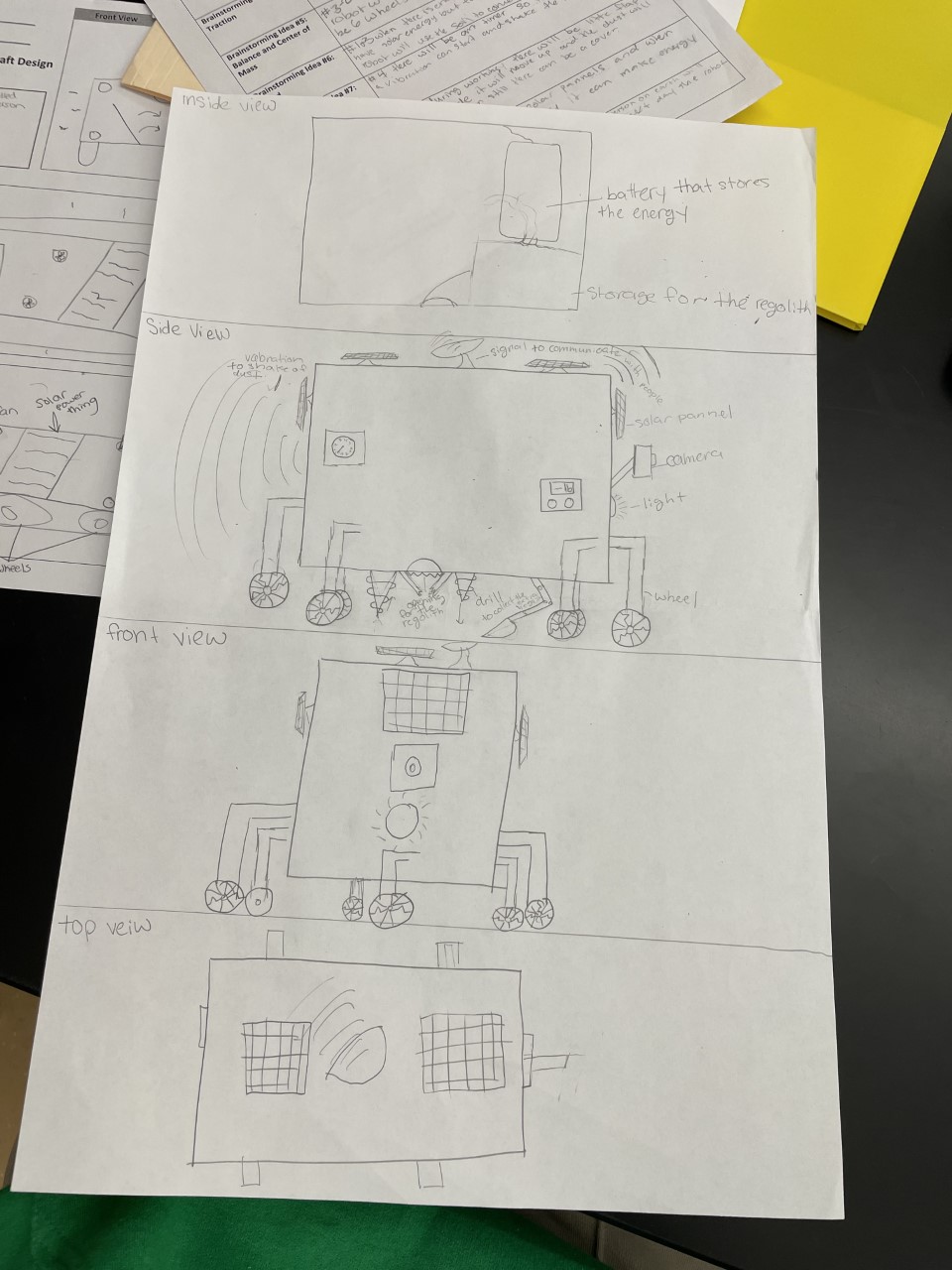
My robot has a layer of pietoealectic material and there will be another layer of tantalum hafnium to keep the rover at a steady temperature. The drill on the bottom is used to break up the regolith for it to be easier to vacuum and scoop up. The wheels are made from piano wires so it will not sink. To manage the balance there is a sensor to alert the robot when there is too much weight in it and there are six wheels for an even center of mass. To energize it, there will be solar energy and if it does not get enough sunlight, it will use the regolith for energy. For dust control it will vibrate after a certain time to knock off the dust. To control the robot when it is resting a person on earth will map out the rover's plan for the next day.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org