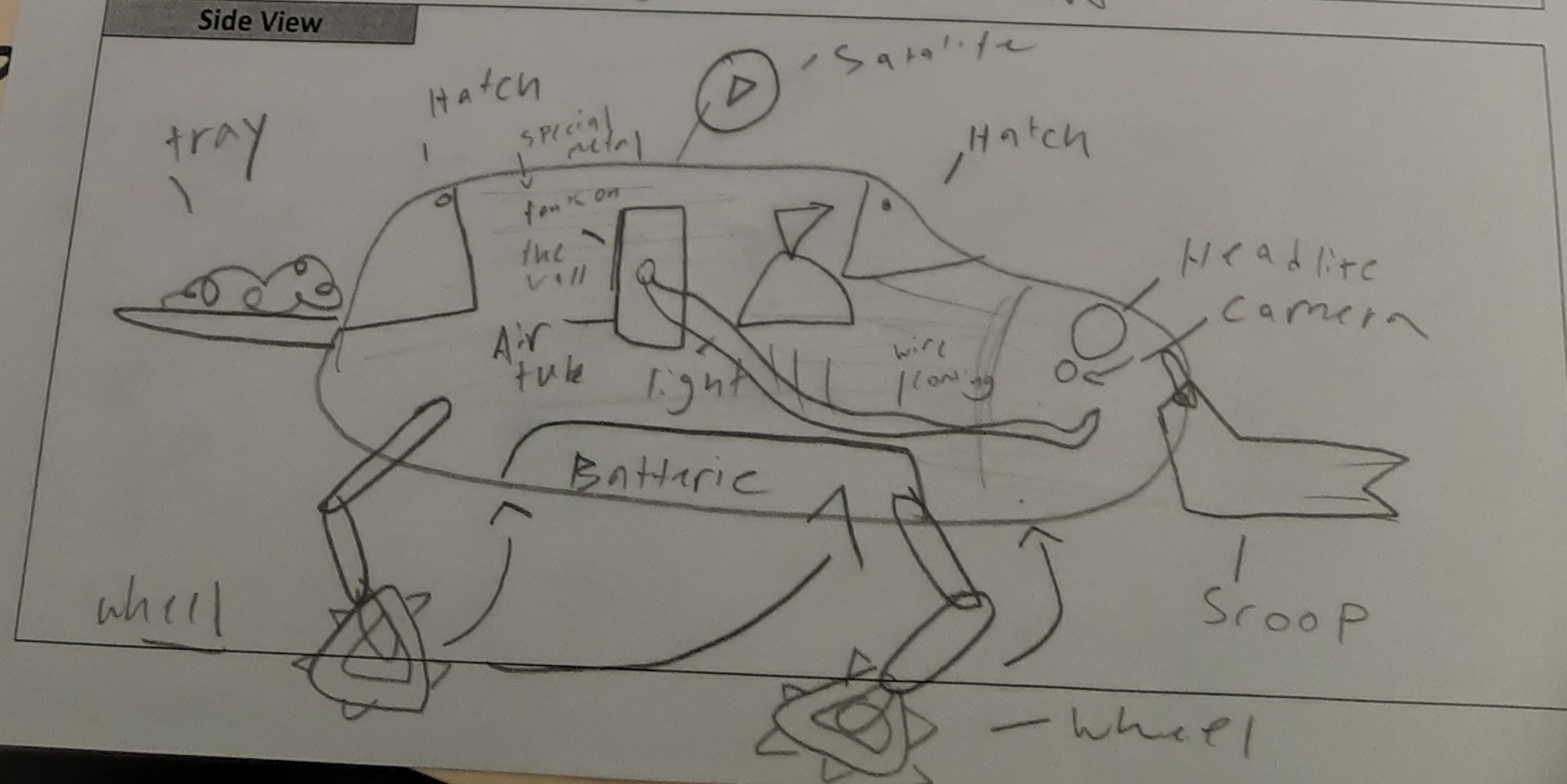
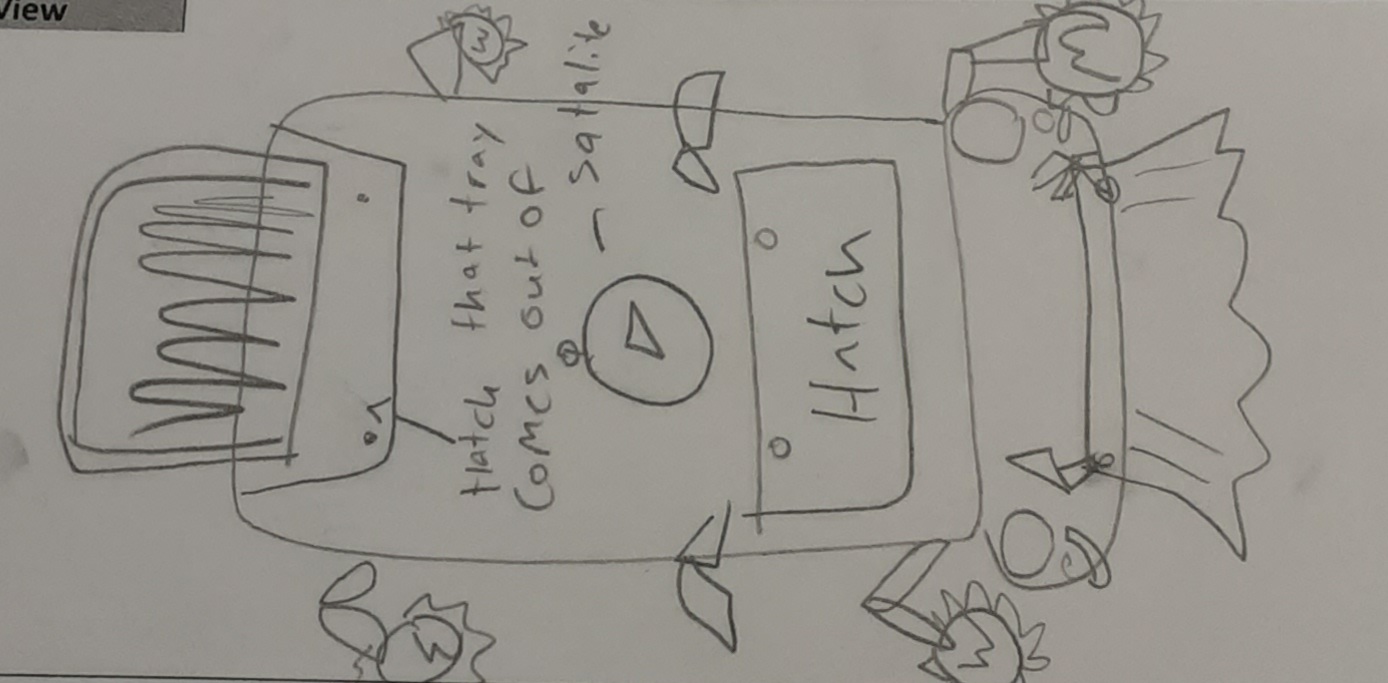
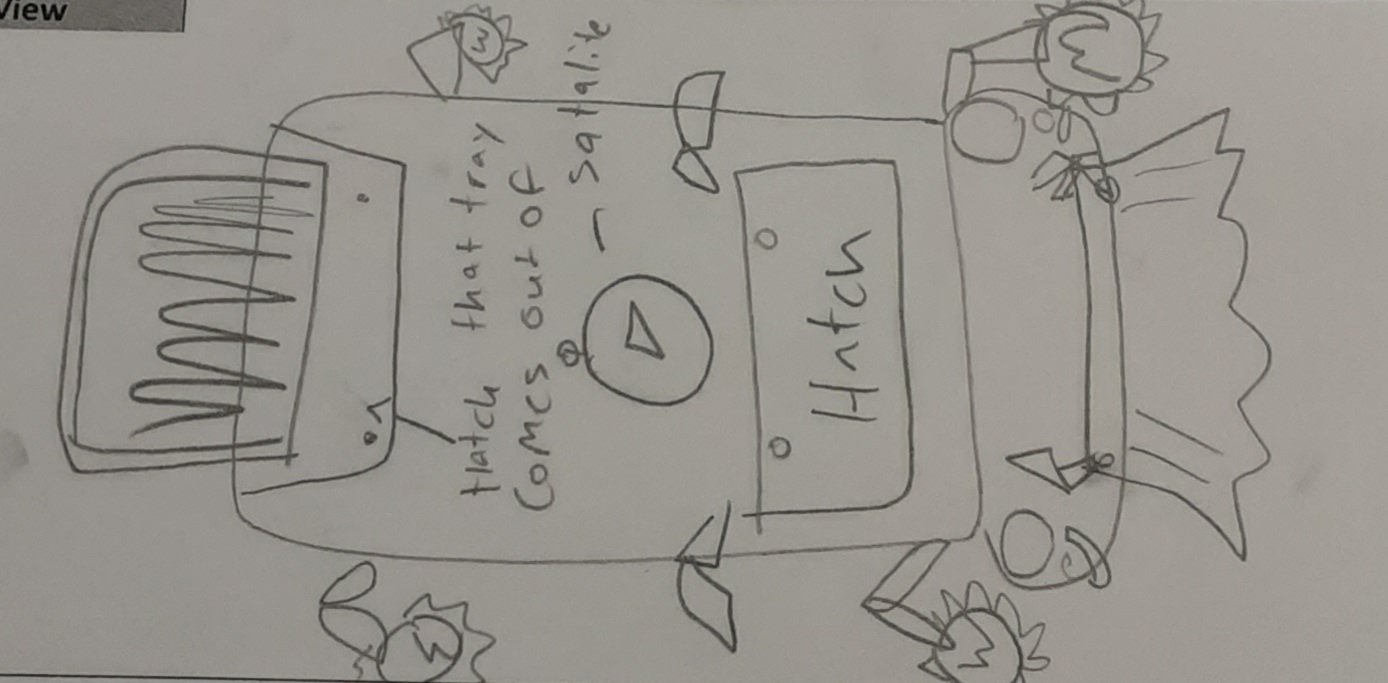
The shape of the bot is like a car, with triangle wheels that have spikes on them for better traction. The power system will main on nuclear batteries. Someone will need to control it with a control panel. The collection of the dirt in the front will balance out with the wires in the back. the wheels will also have expandable legs so that it's easy to get over terrains. the speed of the robot would possibly be 30/40 mph or try to be. Metal covers the robot should be able to keep it from the hot or cold. wire coverings and blows of air from oxygen tanks should keep dust out of crevices where we think it would get stuck. Our bot would use a scoop that falls into a pull out tray that a door latches on and covers when collecting.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org