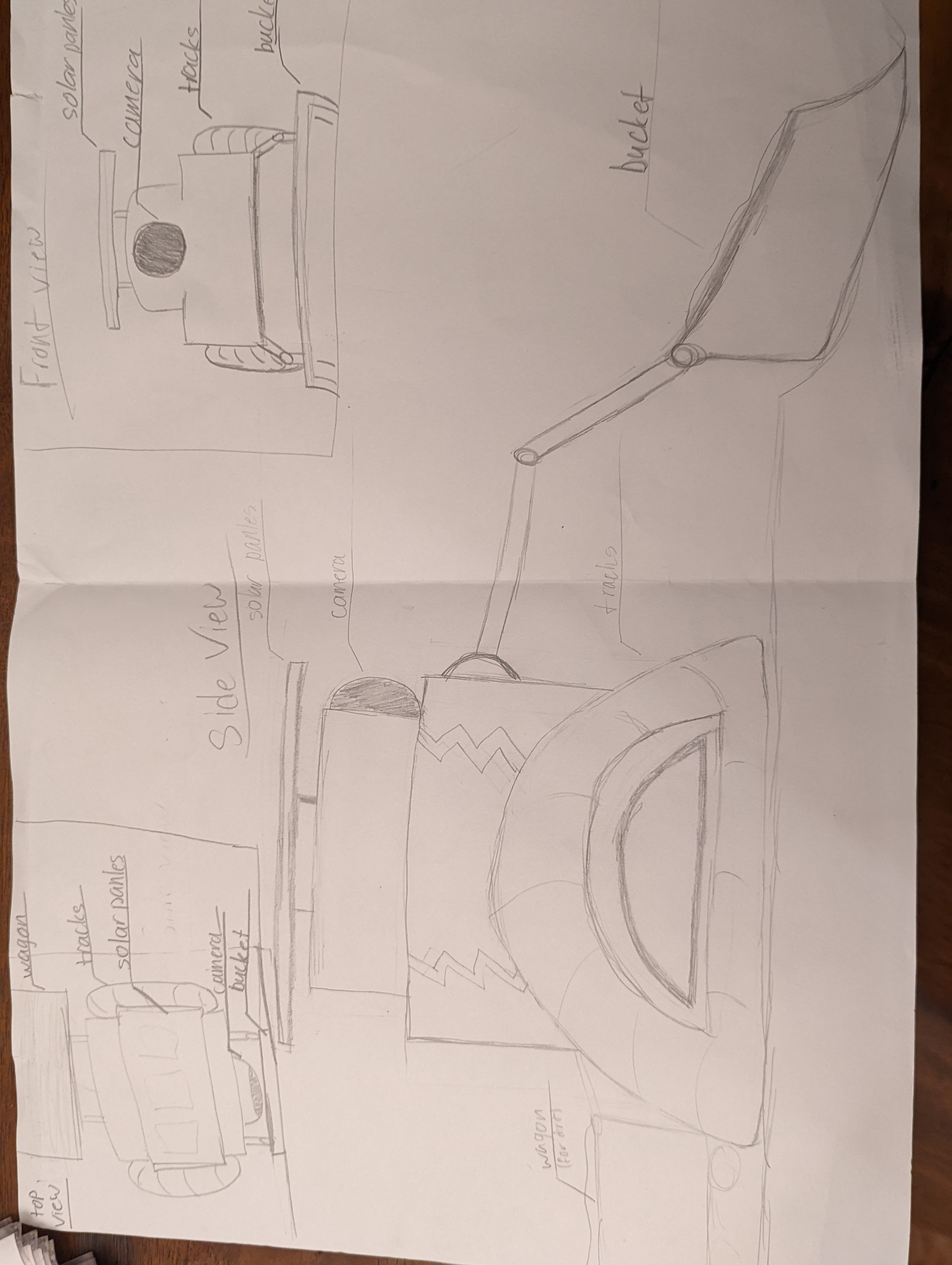
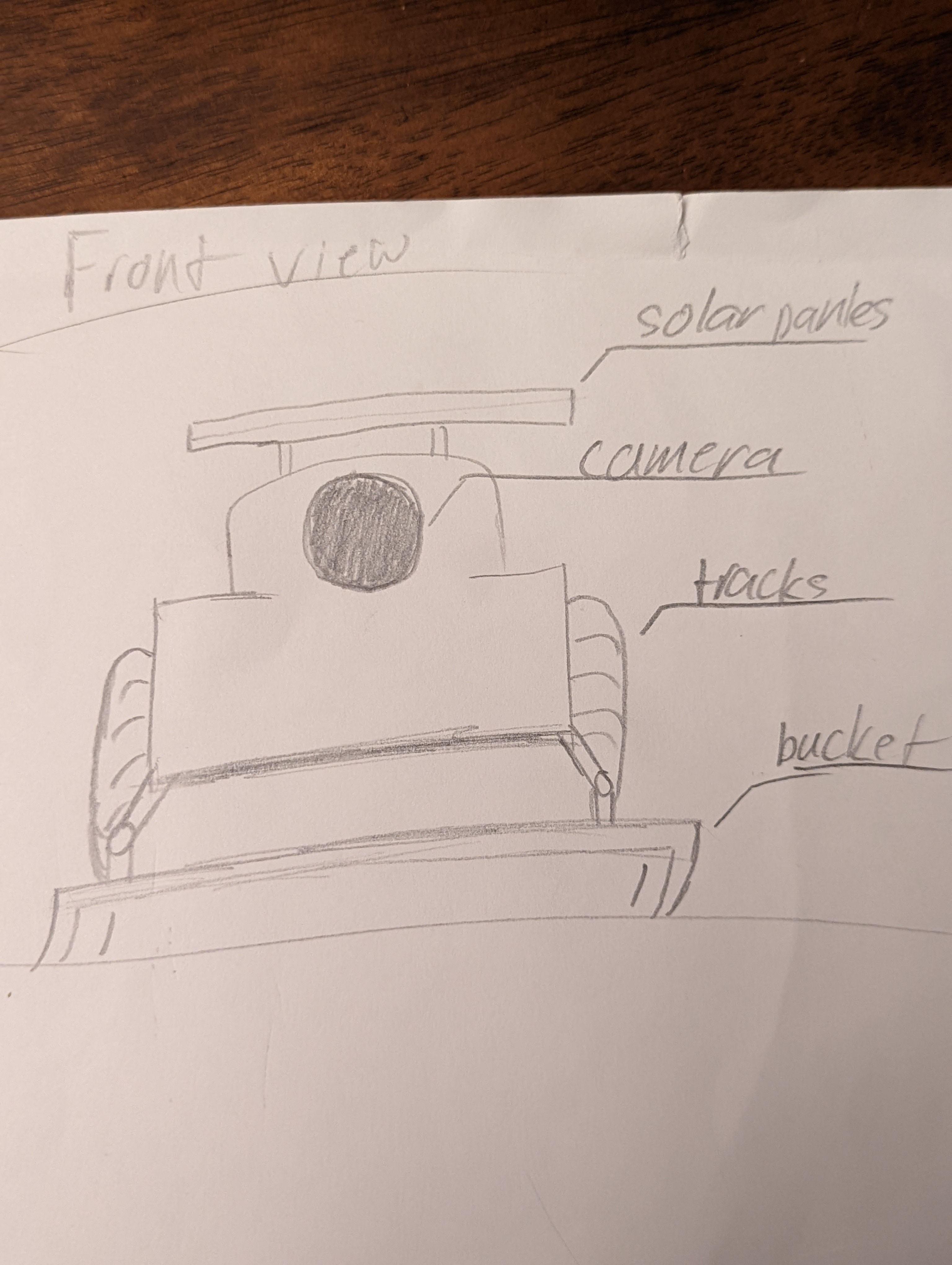
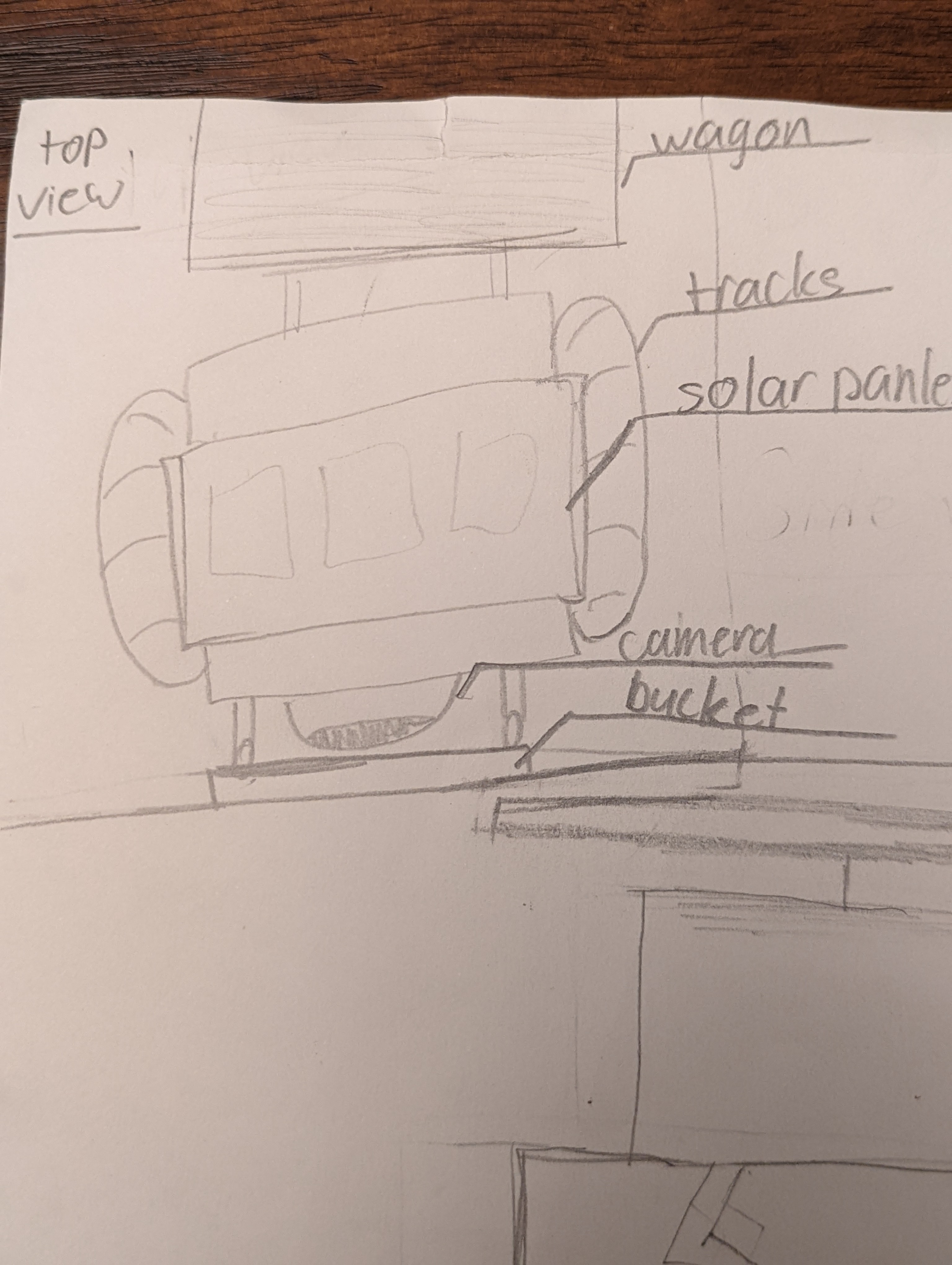
To drive, the rover will be programmed to go to the digging site on a safe path. The rover will be powered by solar re-chargeable batteries that will be charged by the solar panels on top. The rover will have a low center of mass to keep a good balance. The rover will go from 5-10 mph. To handle extreme temperatures the rover will be made of a material that can withstand the heat. the rover will dig with a bucket and scoop it into the wagon behind it. To protect the rover from dust the rover will have a cover.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org