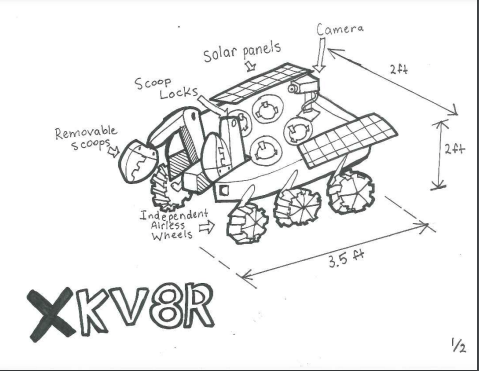
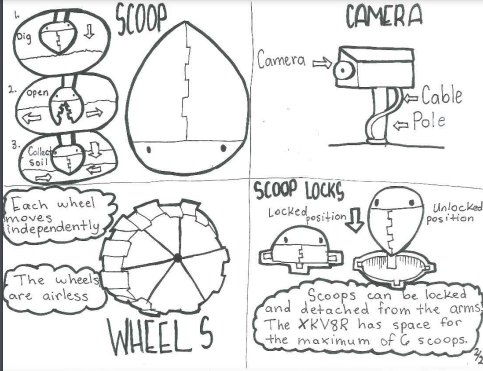
The XKV8R is a remote-controlled robot, so the operator can guide it from the Artemis base. It has individual airless wheels to move around. It also has two arms with 6 removable scoops. Each scoop has a double function: it digs into the ground opens inside the hole it has made and takes it out with a full scoop in just one dig. It then can be detached and stored inside the XKV8R. The free arms can attach to the second set of scoops by itself, and repeat the process until all 6 scoops are full. The arms attach to the scoop locks and lock. The lunar dust can be avoided by using an electron beam. A set of solar panels can provide the required power. Once the XKV8R reaches the Artemis base, the scientist can collect the scoops and take them inside the base for future uses or research.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org