
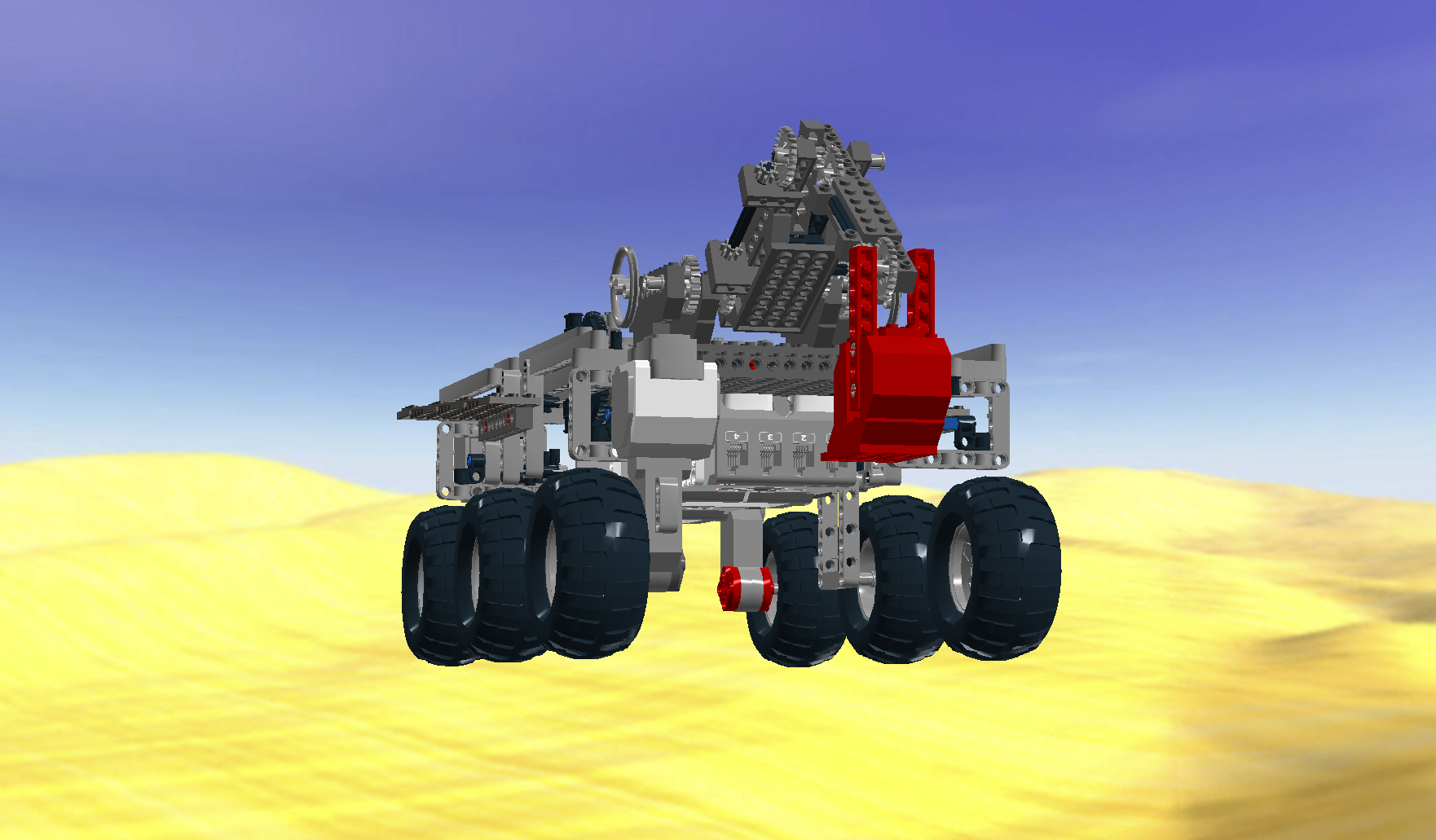

My lunar robot is designed to move the lunar regolith on the moon. Regolith is a very fine powder for which I designed a scoop, just like an excavator, less dirt per trip. My robot is made of lightweight material, with a bare-boned design to be more efficient. The scoop can move 360° to pick up the sediment, deposit it into its bed, transport it, and dump it at its destination using hydraulics. I chose a six- wheel design over tracks, as it provides for better movement and traction on the lunar surface in Micro-G environments. Its wheels can move independently or in coordination, to move across obstacles, or turn on the spot, and navigate the surface of the moon. It captures energy on the side solar panels and would be accompanied by an electrostatic precipitator that would help remove the fine dust in a chamber with blowing air.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org