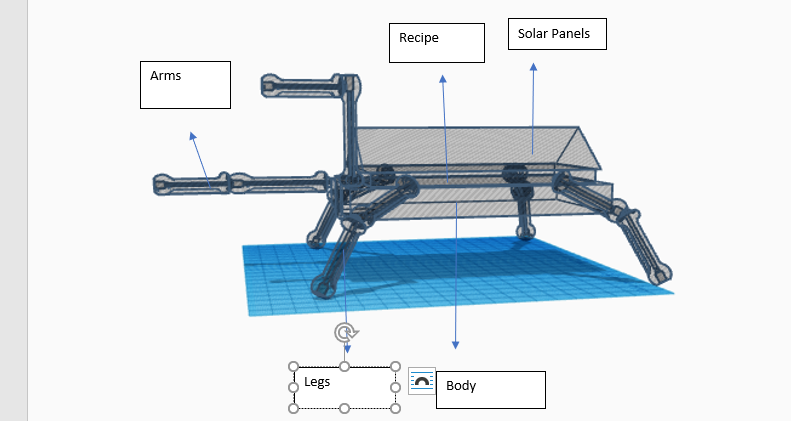

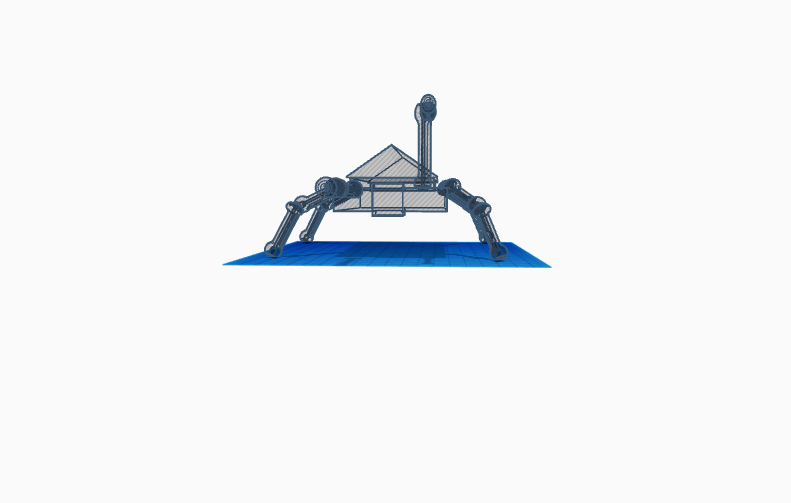
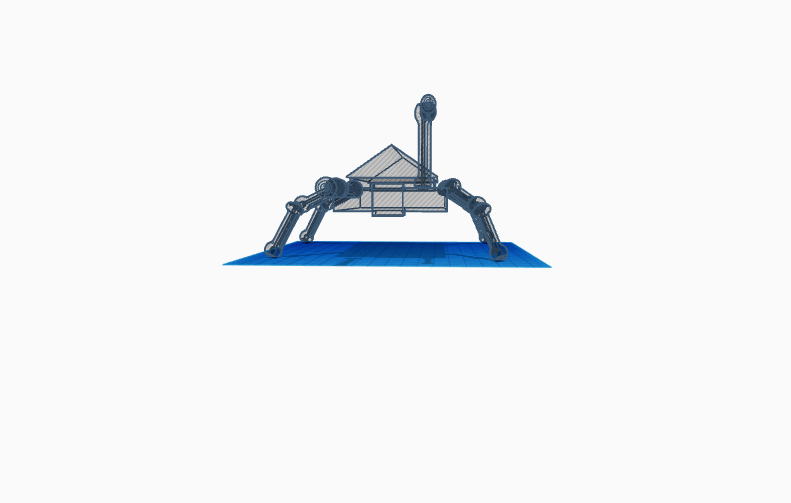
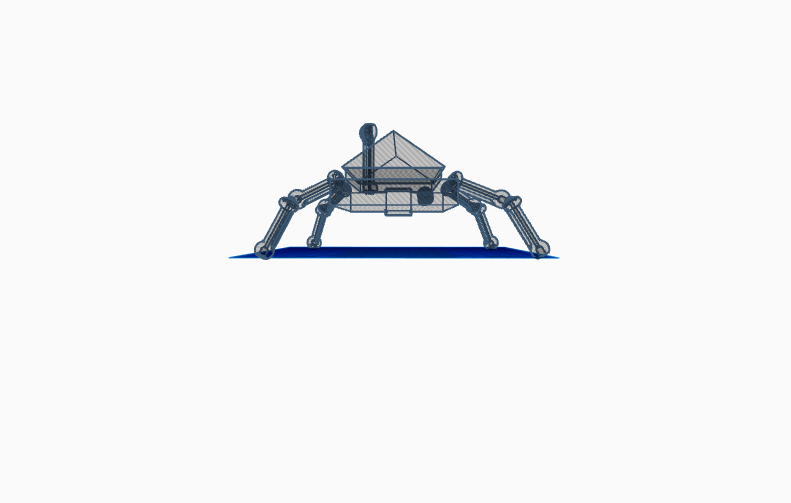
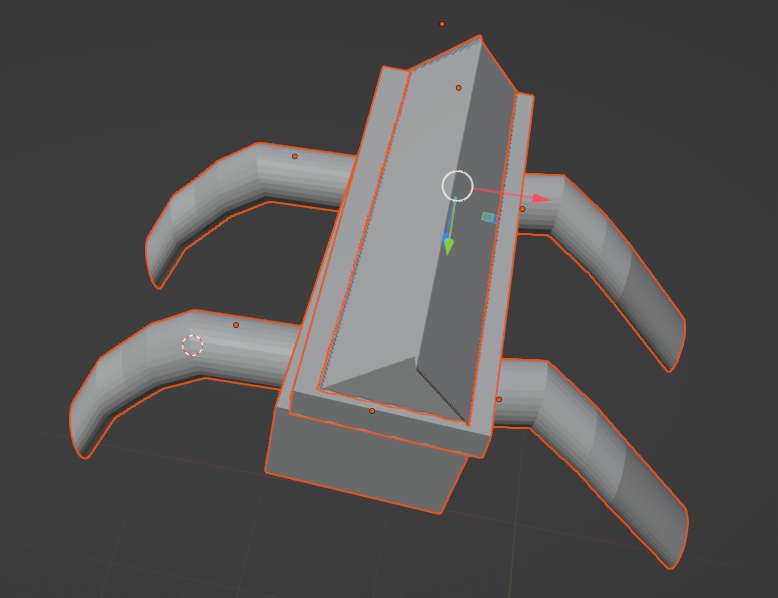
Our robot has a zoomorphic shape based on a boston dynamic design. The robot has 4 legs that allow it greater flexibility and speed in its movement. In the upper part it has two solar panels arranged diagonally like a triangle, these will be able to open to show a container where to store the samples. Along with this at the front will be two arms capable of digging into the lunar soil and taking samples. In addition, each arm and leg will have step motors that will allow them greater precision in their movements.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org