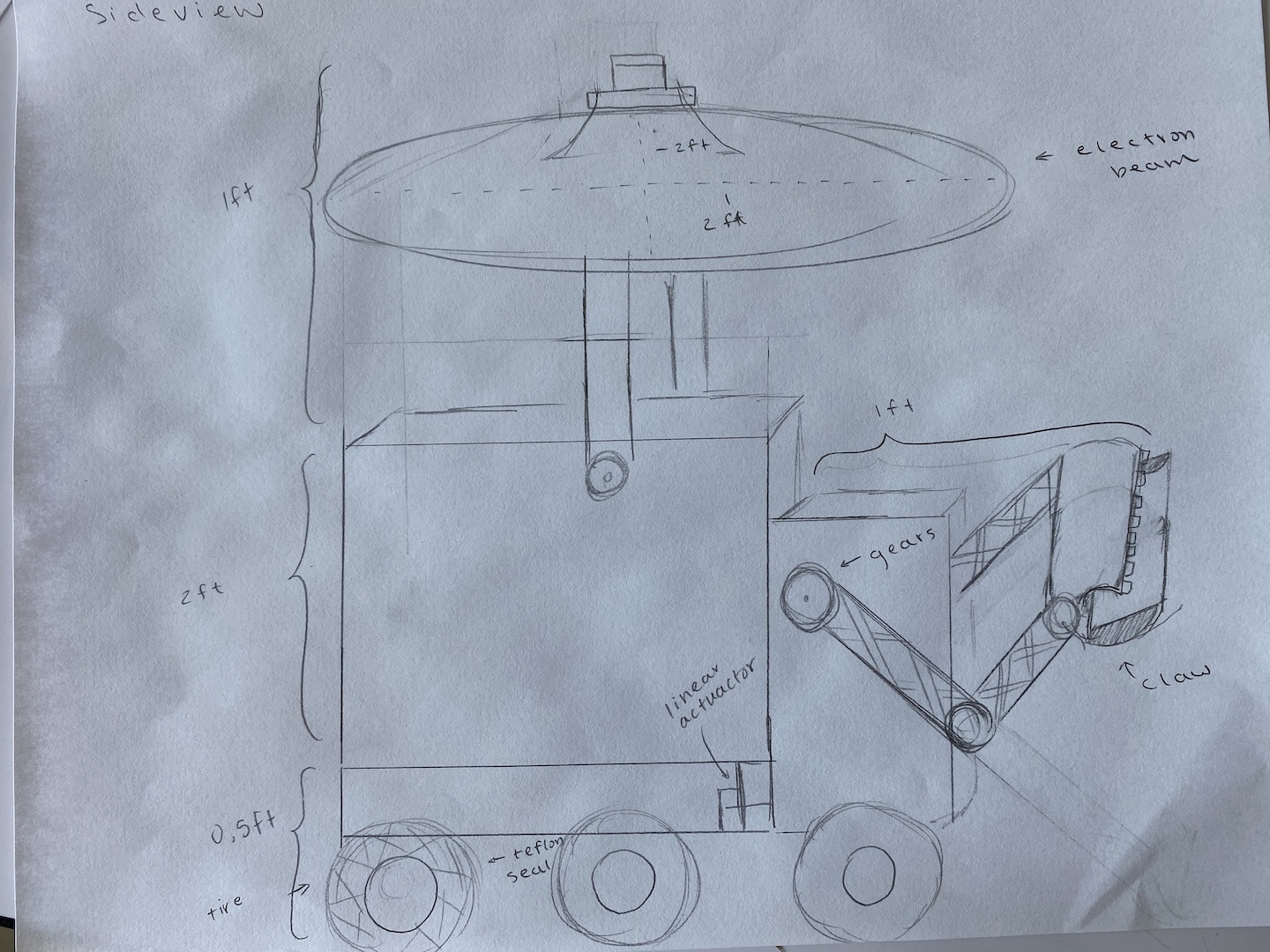
The claw of the robot has 2 sets of gears to increase flexibility. The claw would dump lunar regolith into a bin on its back, with a base of 1 by 1 foot and a height of 2 feet, to transport more dirt per trip. The robot will have a distance sensor to know when the bin is full, telling the robot to go back to base to dump it out. The robot will also have a linear actuator to push the bin up on one end to dump out the lunar regolith. The wheel will have Teflon seals on to protect it from lunar dust and a ring light shaped electron beam that emits an electron beam down on the robot to eject lunar dust from sticking onto the robot. The electron beam will be one foot above the robot and have a diameter of 2 feet.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org