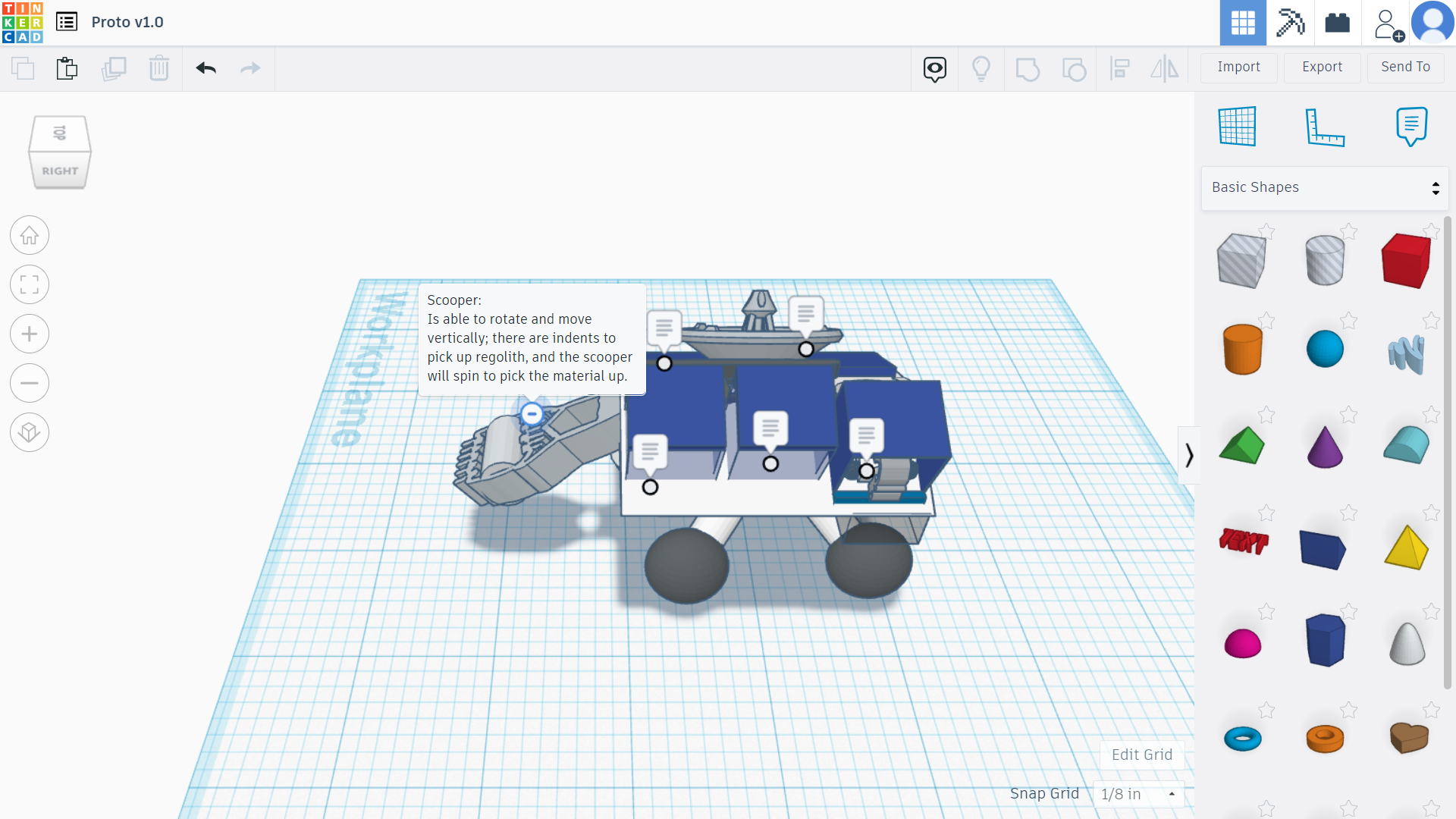
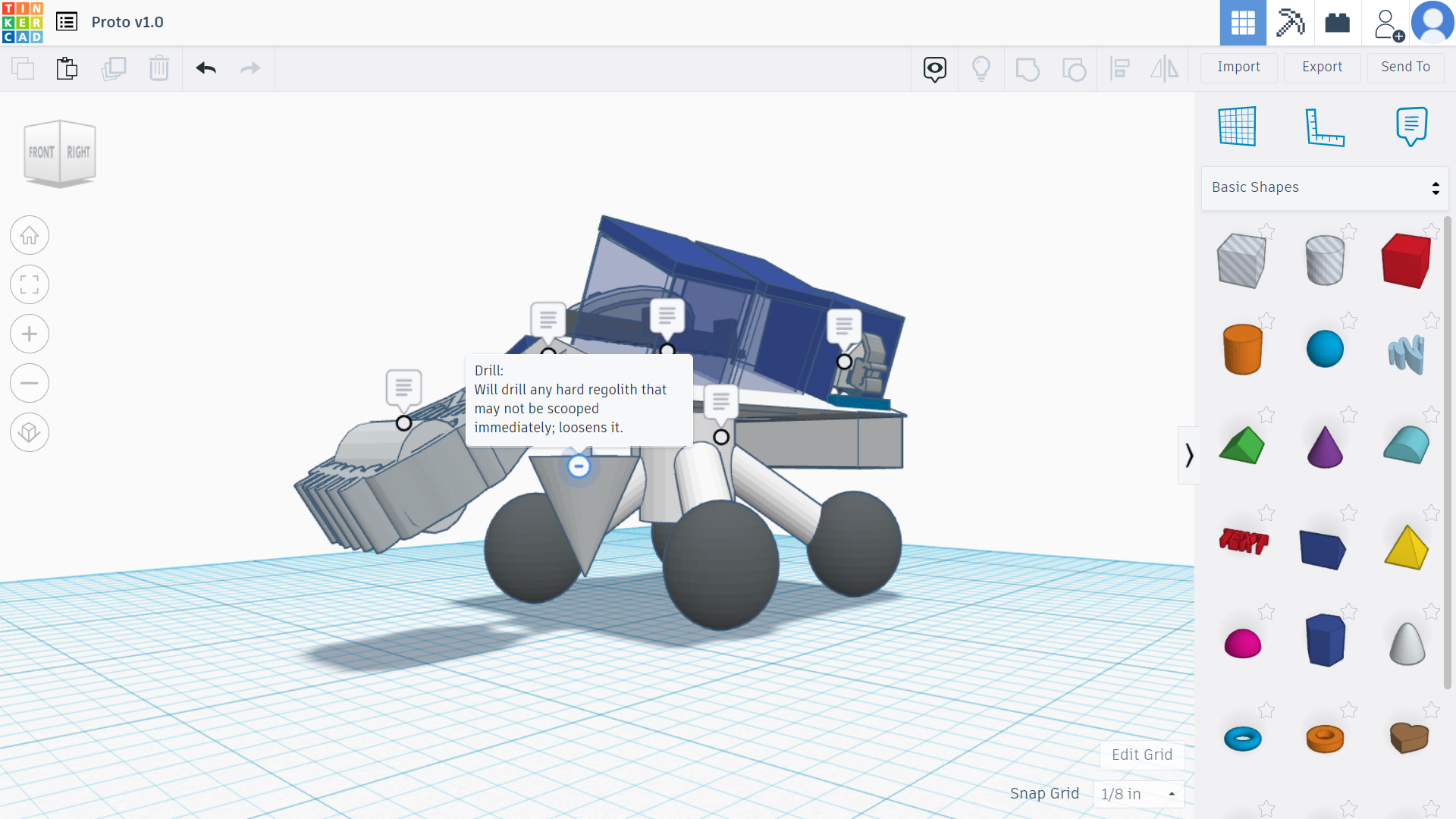
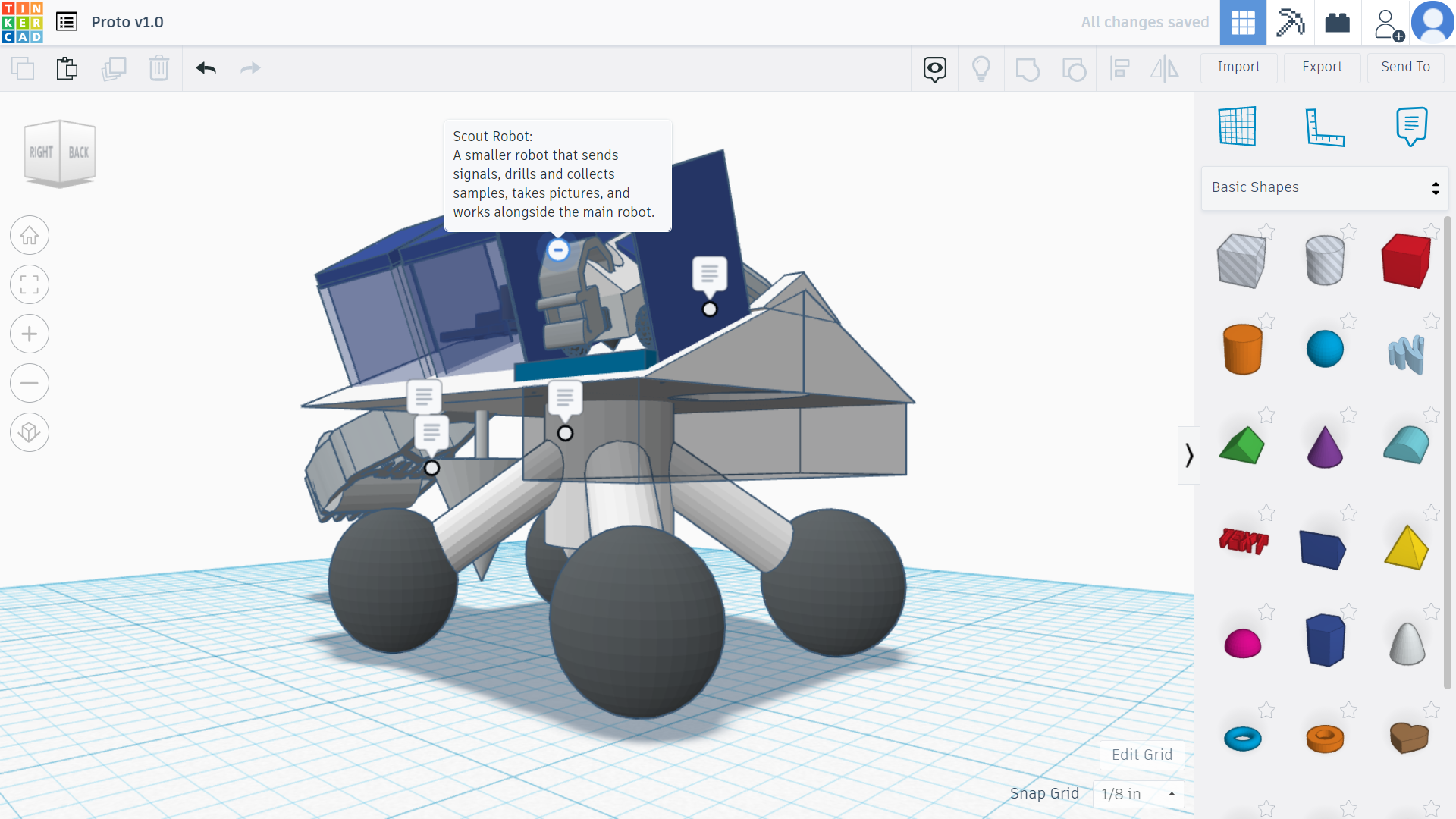
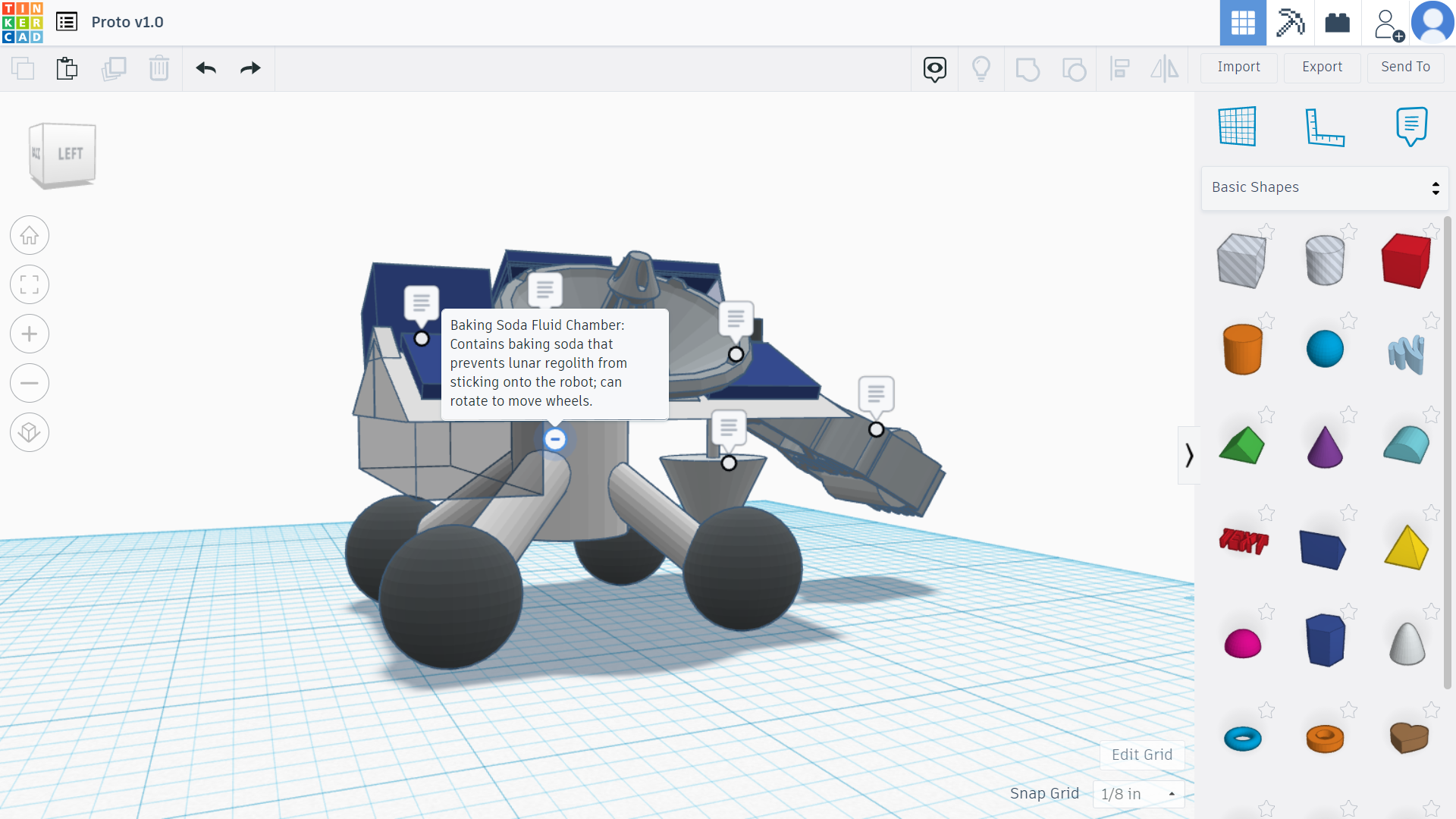
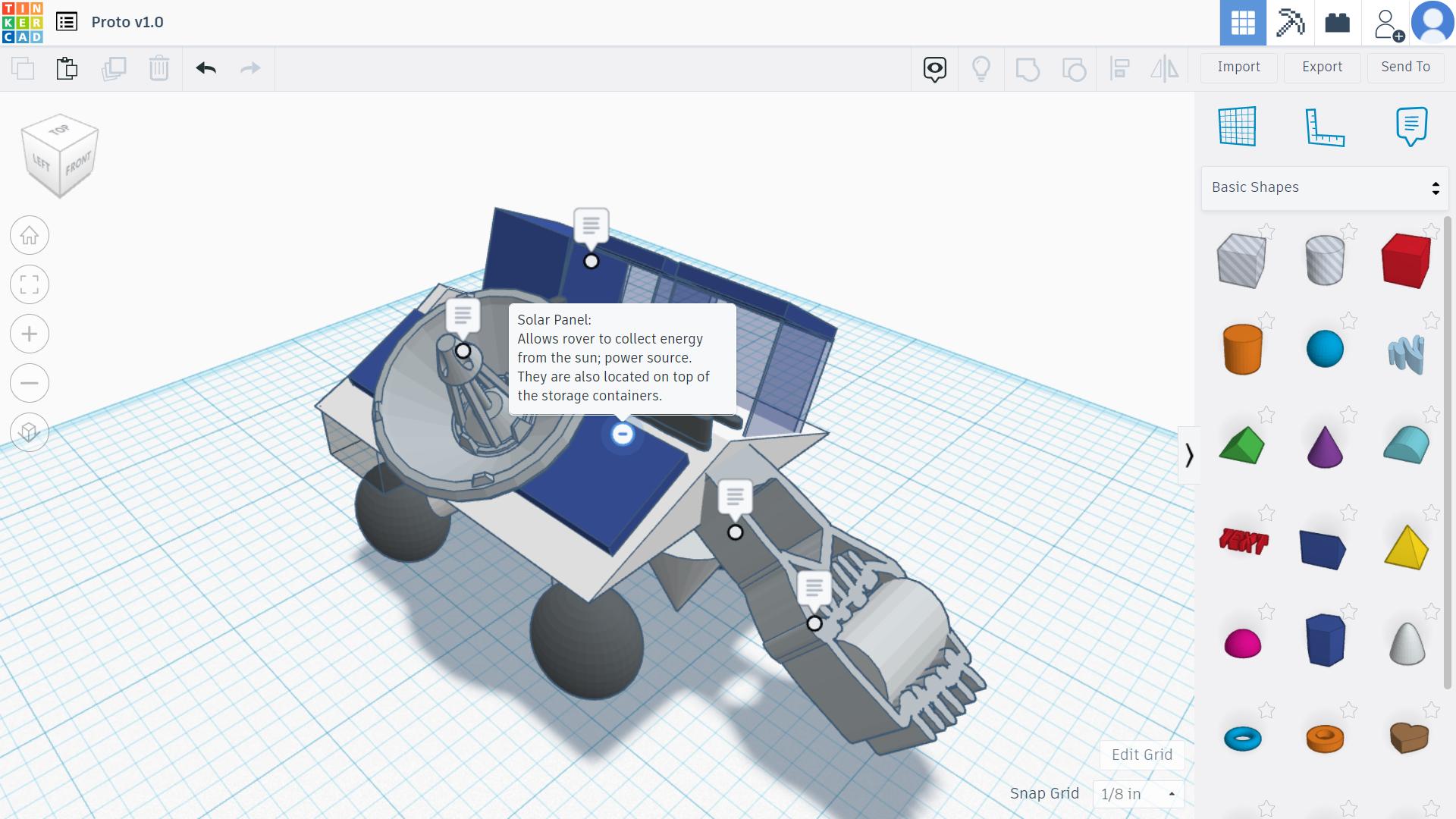
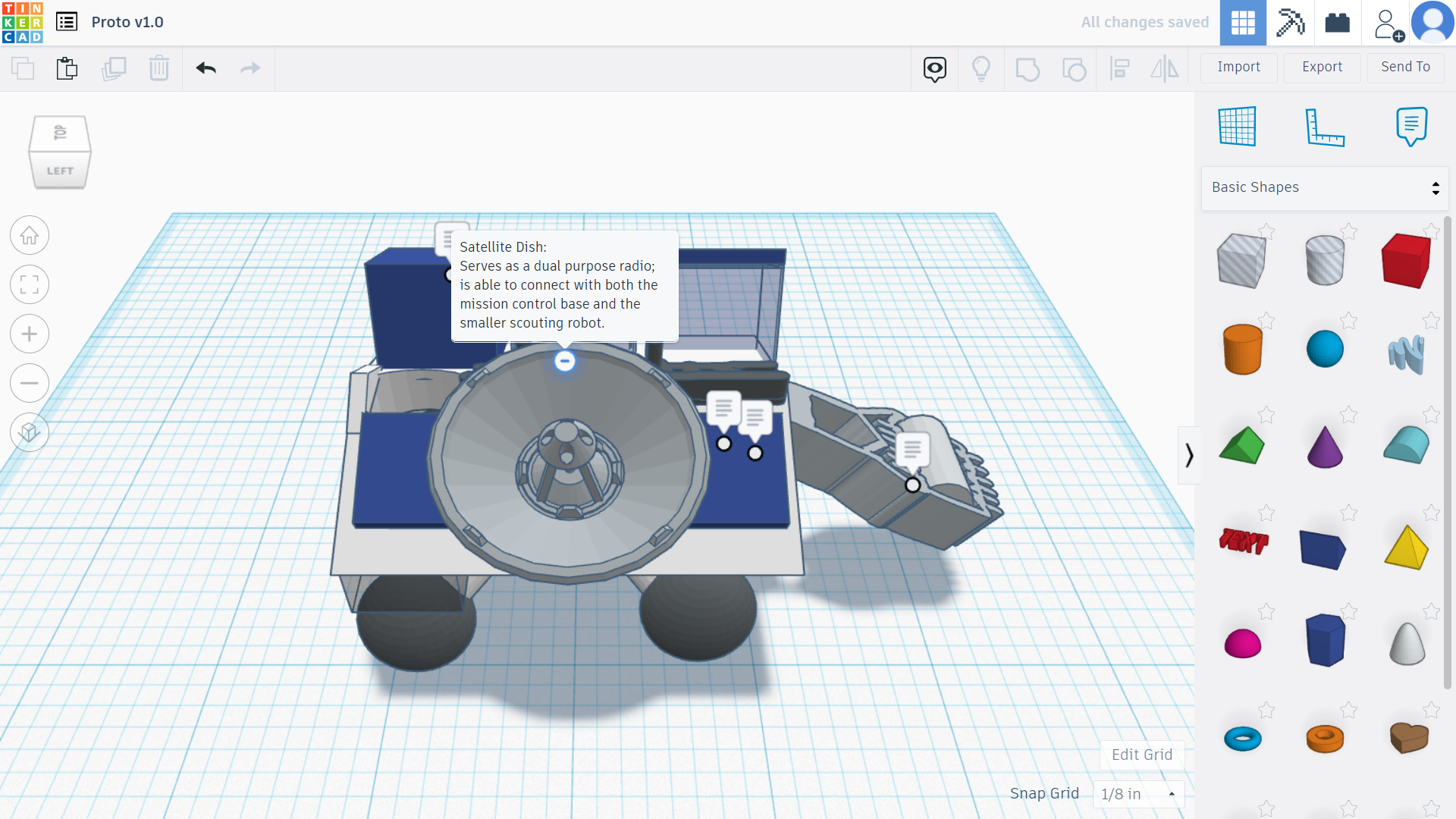
Our design has two robots with similar features including a fluid chamber to minimize regolith damage, a drill to loosen rock, four all-terrain wheels for transportation, and solar panels for energy. The larger excavation robot has a rotating scooper that picks up regolith. The regolith is then dumped on a conveyor belt before getting deposited in one of three storage compartments, which are equipped with vacuums to ensure its collection. The smaller scout robot is to travel alongside the excavation model, emit a signal, take pictures, and collect samples. The signal will travel through rock but bounce back on water or metal. The scouting robot will reside in a special compartment on the excavation robot before getting deployed when necessary, and the two robots will have a connection which causes the excavation robot to drill further on an area that reflects the signal produced by the scout robot.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org