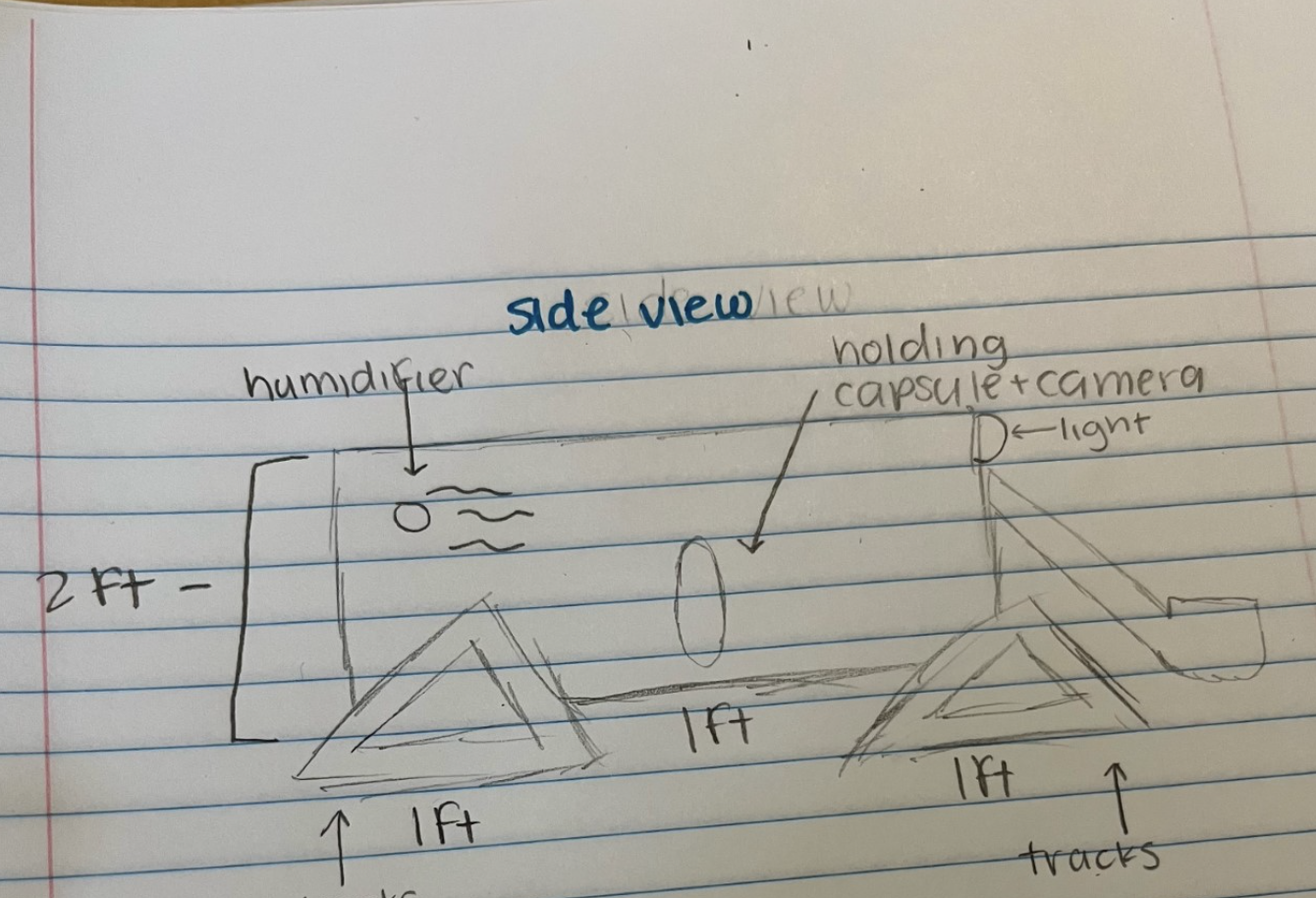
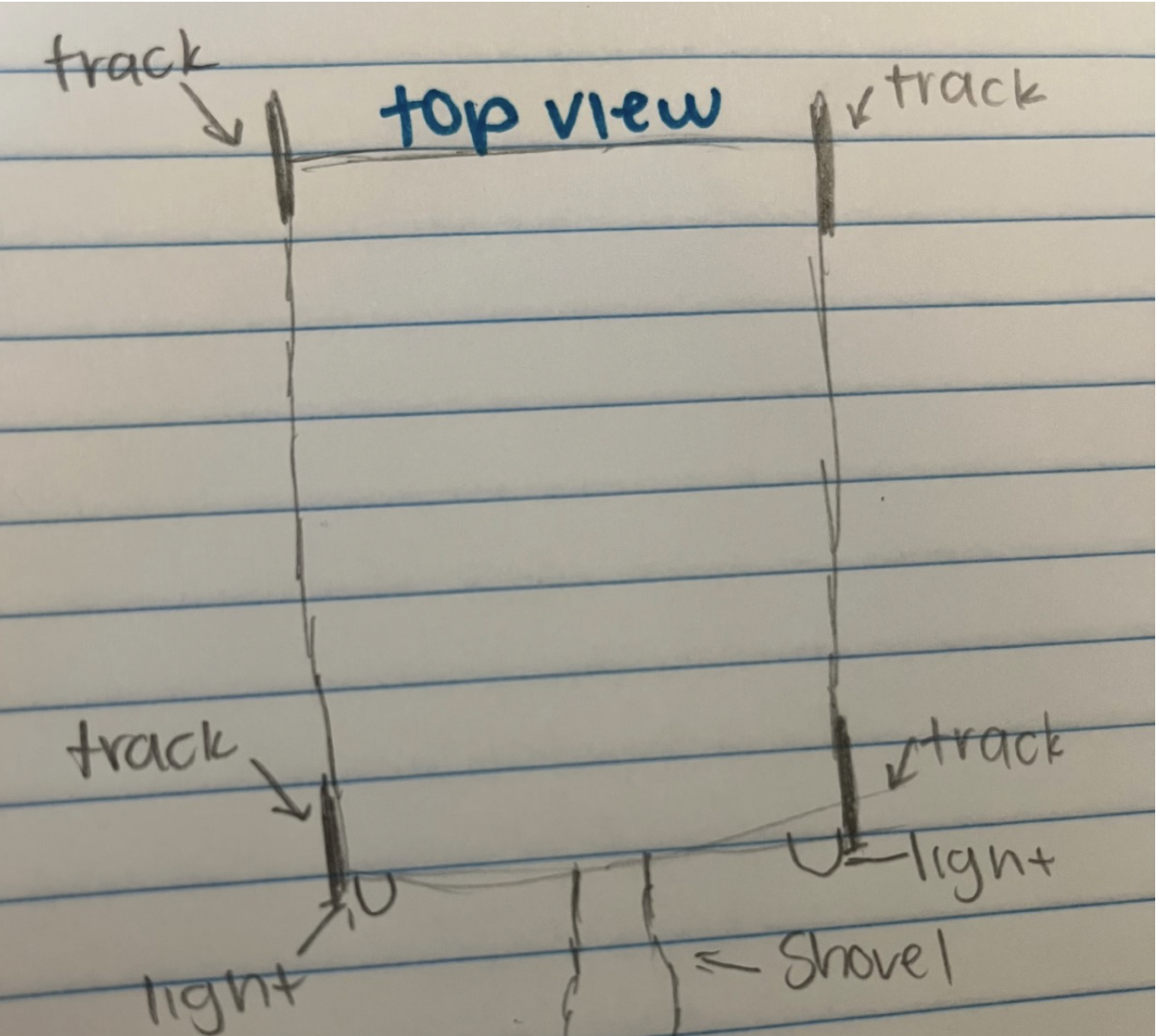
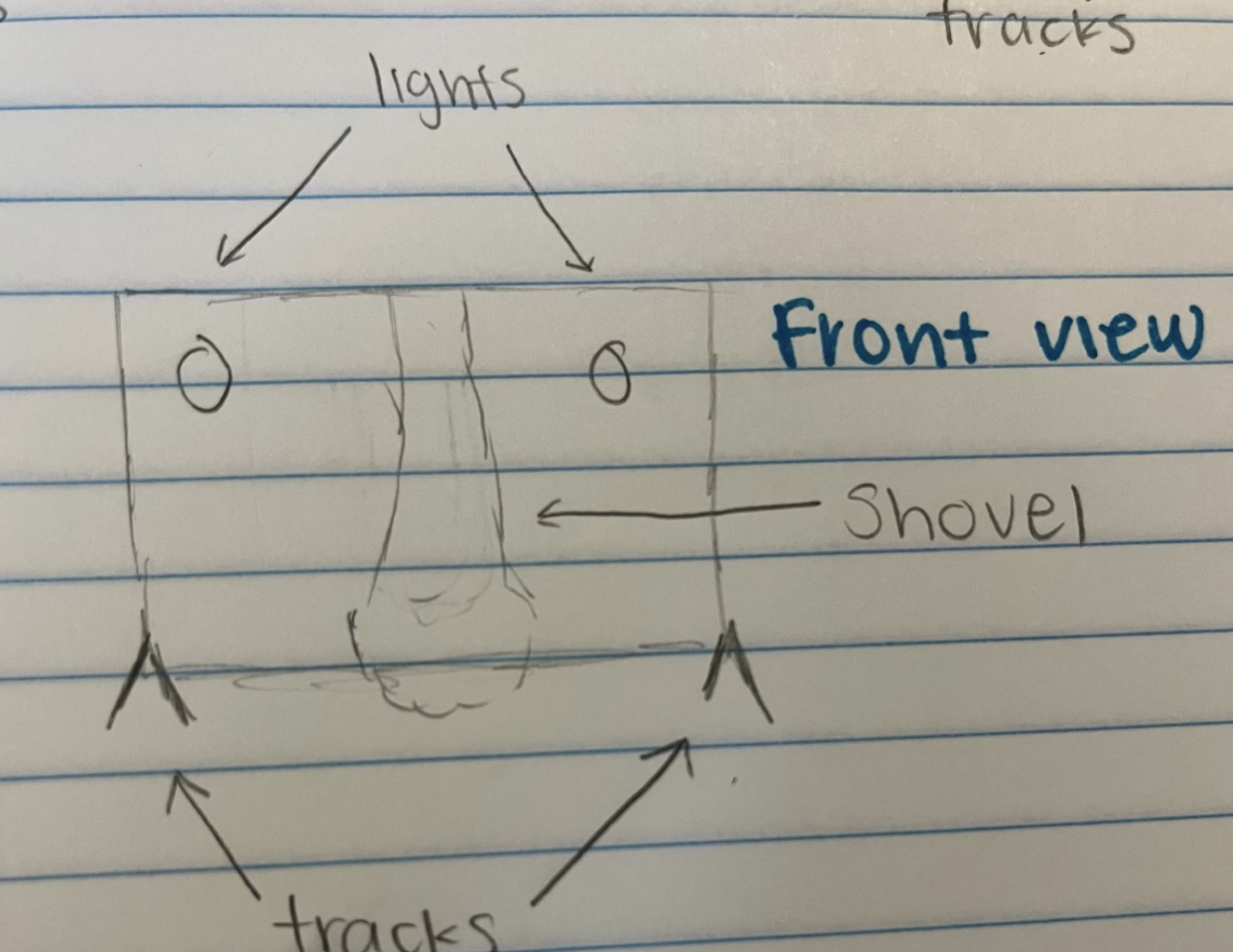
My robot features textured tracks designed to drive over rough terrain, a shovel to scoop lunar regolith, a filter to filter through the particles, and an examining/holding capsule with a camera so engineers on Earth can examine the sample. It also features lights so its action is visible. The bot is controlled by a remote controller, with the shovel having its own section on the controller. The shovel is used by the arms bending and propelling the sample back into the capsule. I also have a humidifier at the top to get rid of static cling.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org