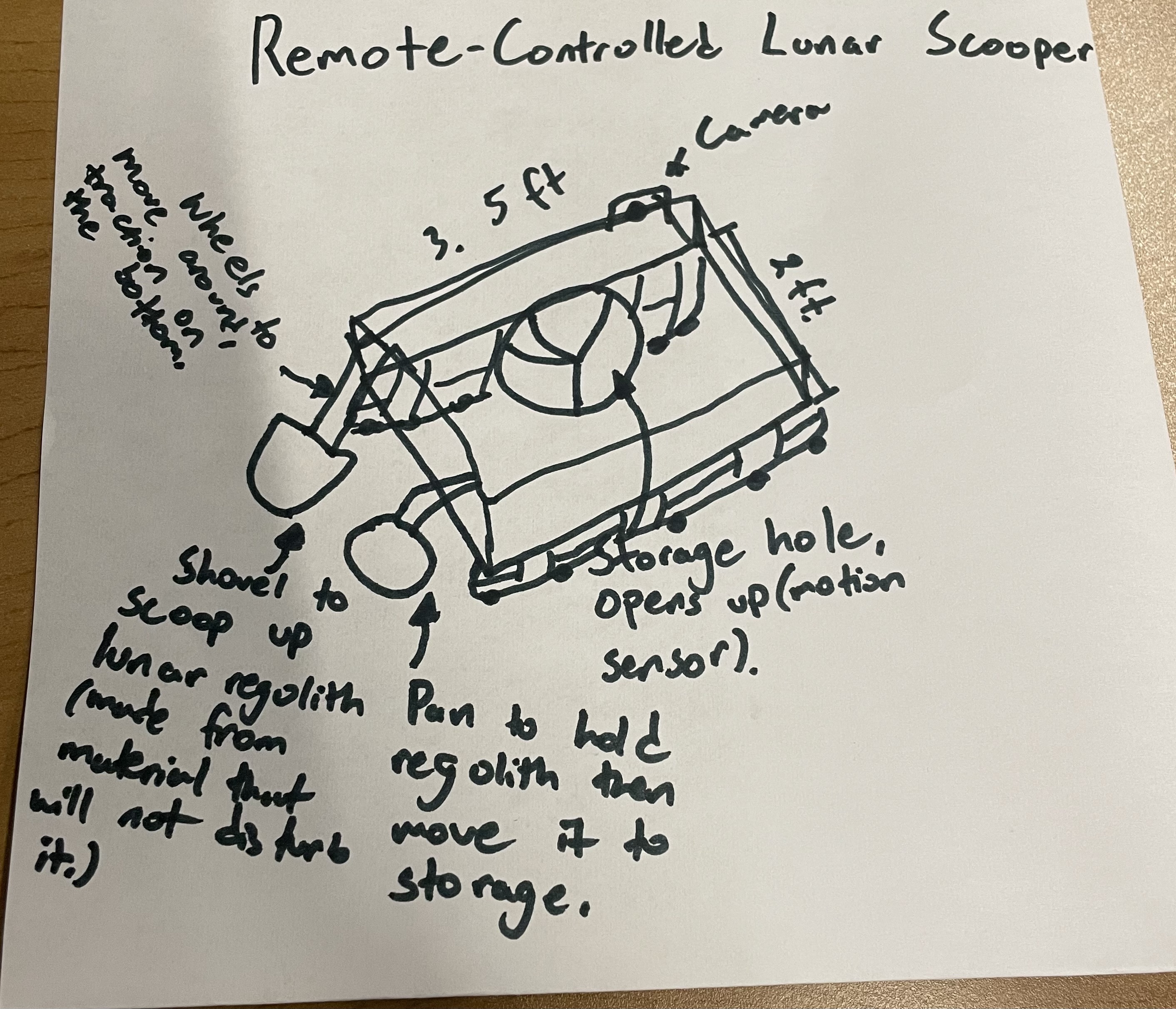
My robot will scoop lunar regolith with a shovel made from special material that will not disturb it while it is being collected. It will then dump the regolith into a pan that it has attached to it, and the pan will dump the regolith into a special storage hole that opens up when it senses motion. The regolith will be safely secured in this hole. My robot will carry lots of dirt in fewer trips than others. The hole is both wide and deep, so the robot has a considerable amount of storage space. This leads to more efficiency, seeing as it will collect a good amount of regolith, make its way back, send the regolith to Earth, then go collect more. It will obtain more regolith in fewer trips. My robot will be made out of special material that will not disturb the regolith.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org