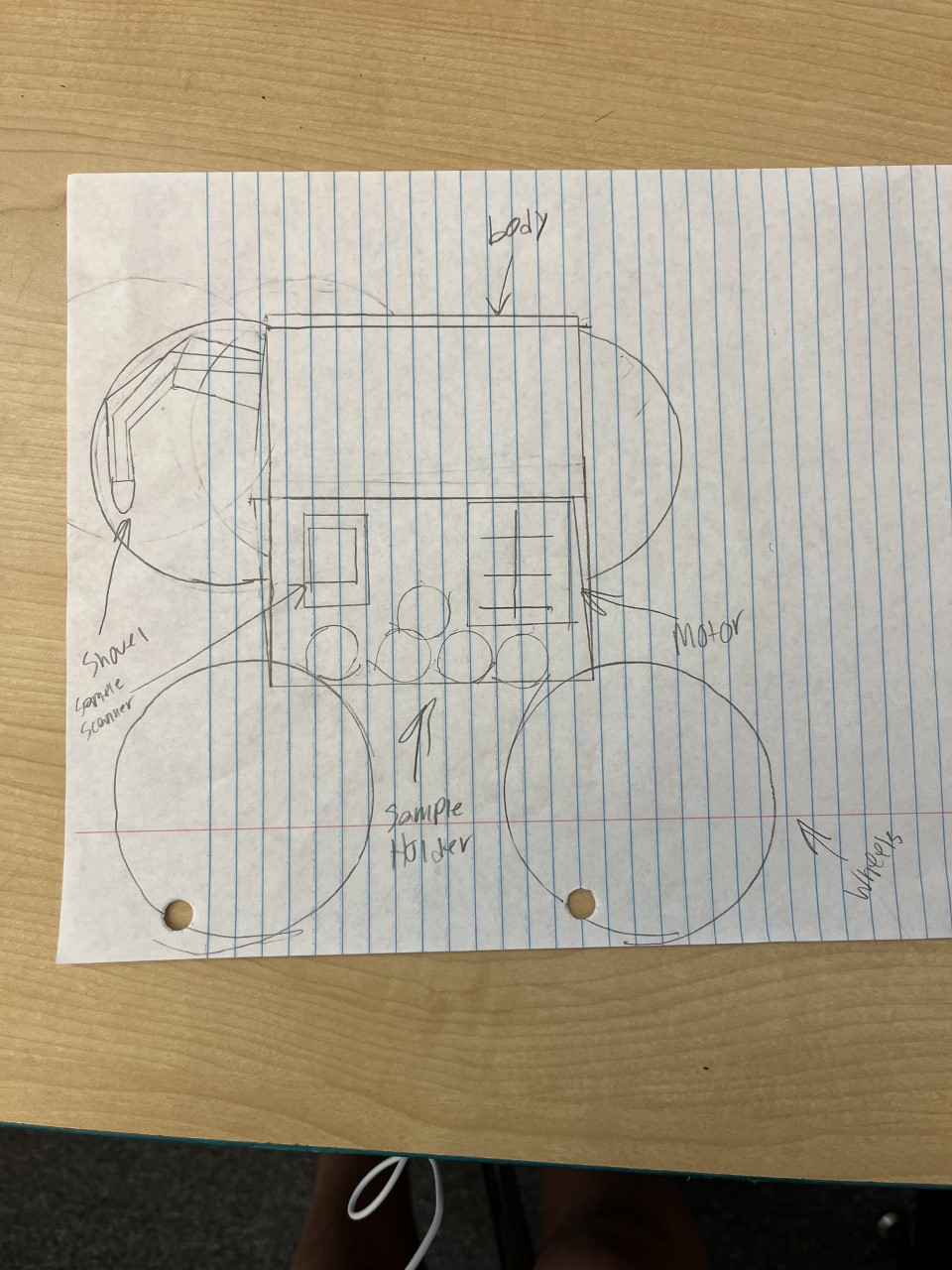
My robot is a multi-tasking lunar robot. It does tasks like dig, store the items dug, scan the items dug, and report them to earth (sends them to the space station). This robot is controlled by a remote system on a computer. Physical design: my robot digs with the shovel attached to the main compartment. The shovel is controlled by hydraulics and hydraulic pumps. The dirt/ rock once scooped up will be sent through the shovel arm into the main compartment. Operational design: my robot will be able to carry a moderate amount of dirt in the main compartment where it gets scanned, and the details get sent down to earth. Dealing with dust: my robot will be covered in a tough metal outline that will reflect dust and projectile objects. Most of the bot will be covered in this metal to help keep it safe.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org