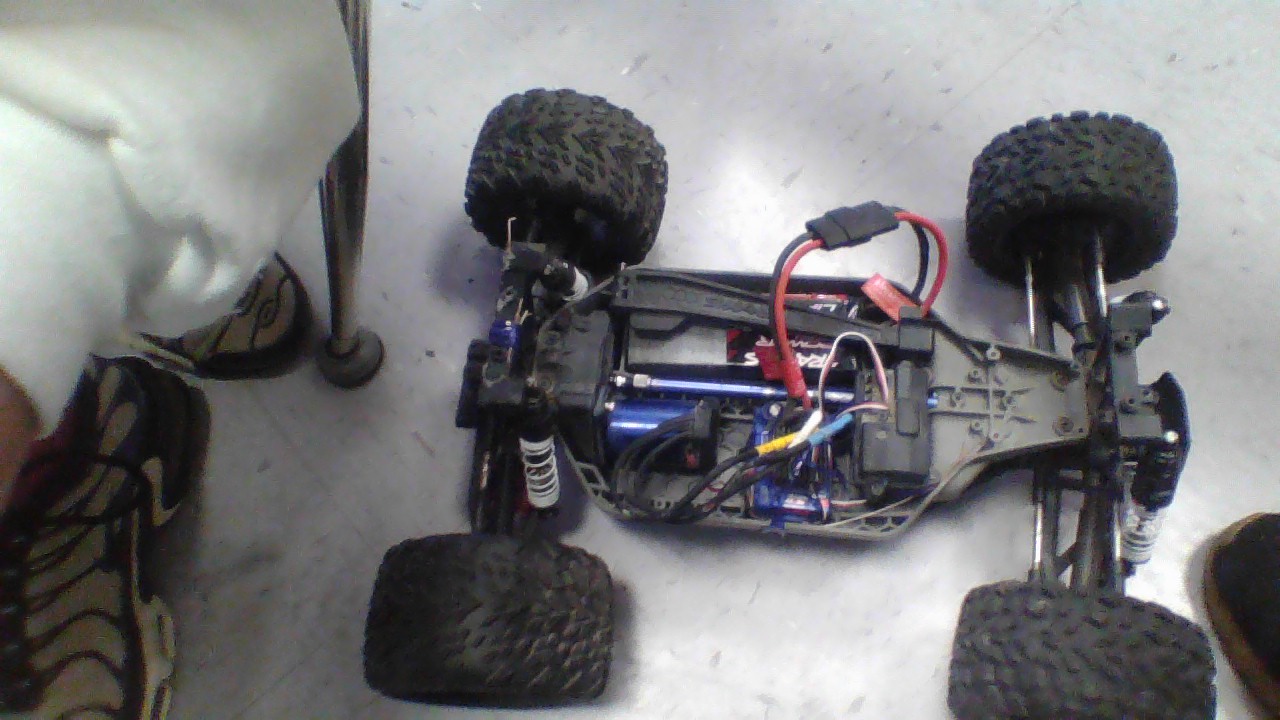
My robot has 4 wheels. I chose 4 wheels because it is a very easy and simple design
My design of 4 wheels works very well and is consistently successful. Unfortunately, I never got the chance to build the sample collector but I was positive it was going to work very very well. In the front and rear, there were 2 differentials the motor was also placed in the back connected to a long drive train that connected it to the front differential. Now although the tires were important I didn’t put much thought into them because after about a year of using them I know that they are very efficient.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org