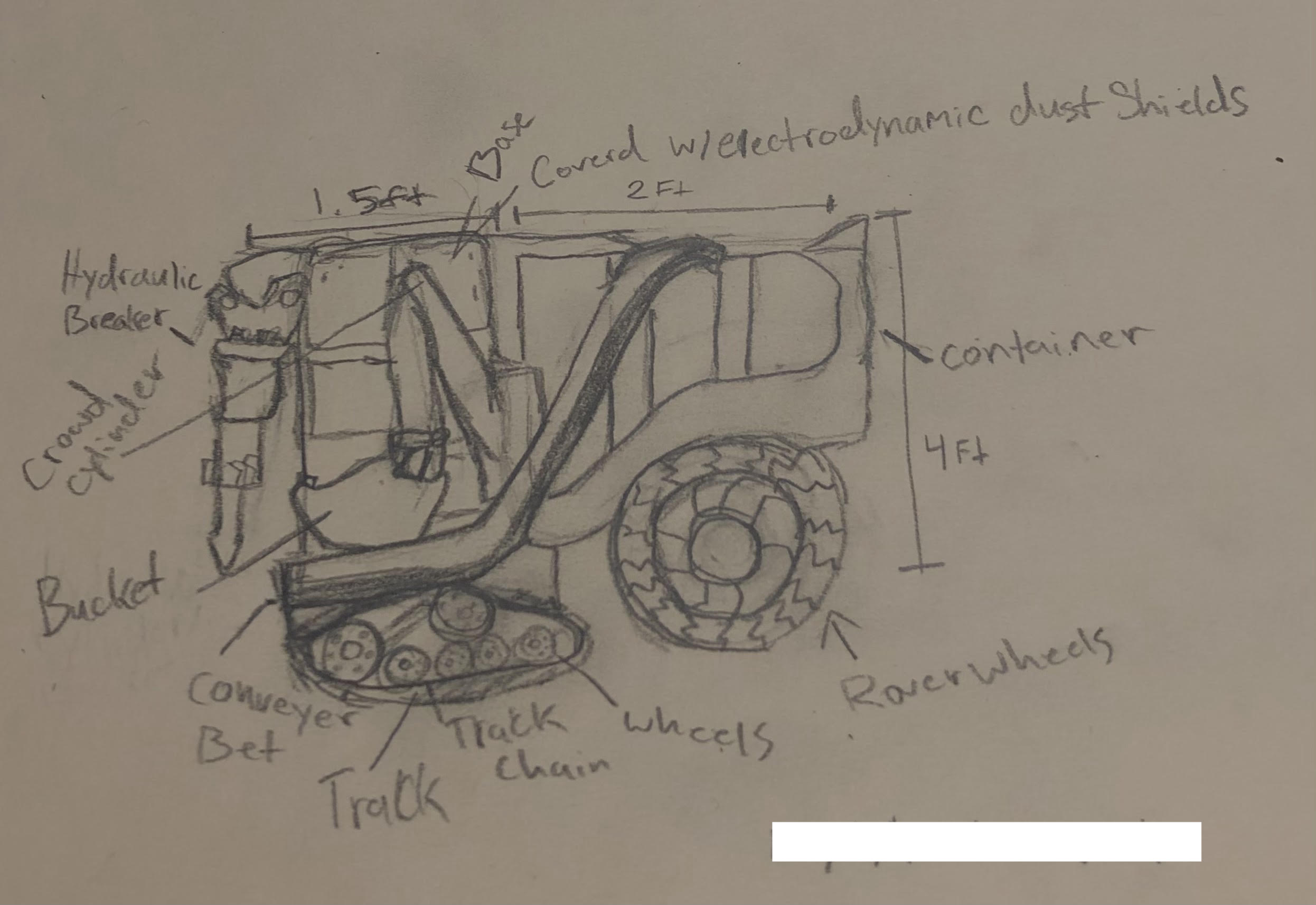
The beginning of the process with my robot would start with the hydraulic breaker drilling into the needed lunar soil/regolith. Then the stick attached to the hydraulic cylinder digs into the drilled regolish with an attached bucket and scoops up as much as possible. Then the bucket would be brought back to its original position and dump the regolith onto a conveyor belt. Said conveyor belt would carry the regolish up to the top of the container and pour it in. It moves using two rover wheels connected to the bottom of the container and sprocket wheels connected to the body. The body of the robot would contain all the controls and would be protected by electrodynamic dust shields to prevent dust from the regolith messing up/ruining the inside.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org