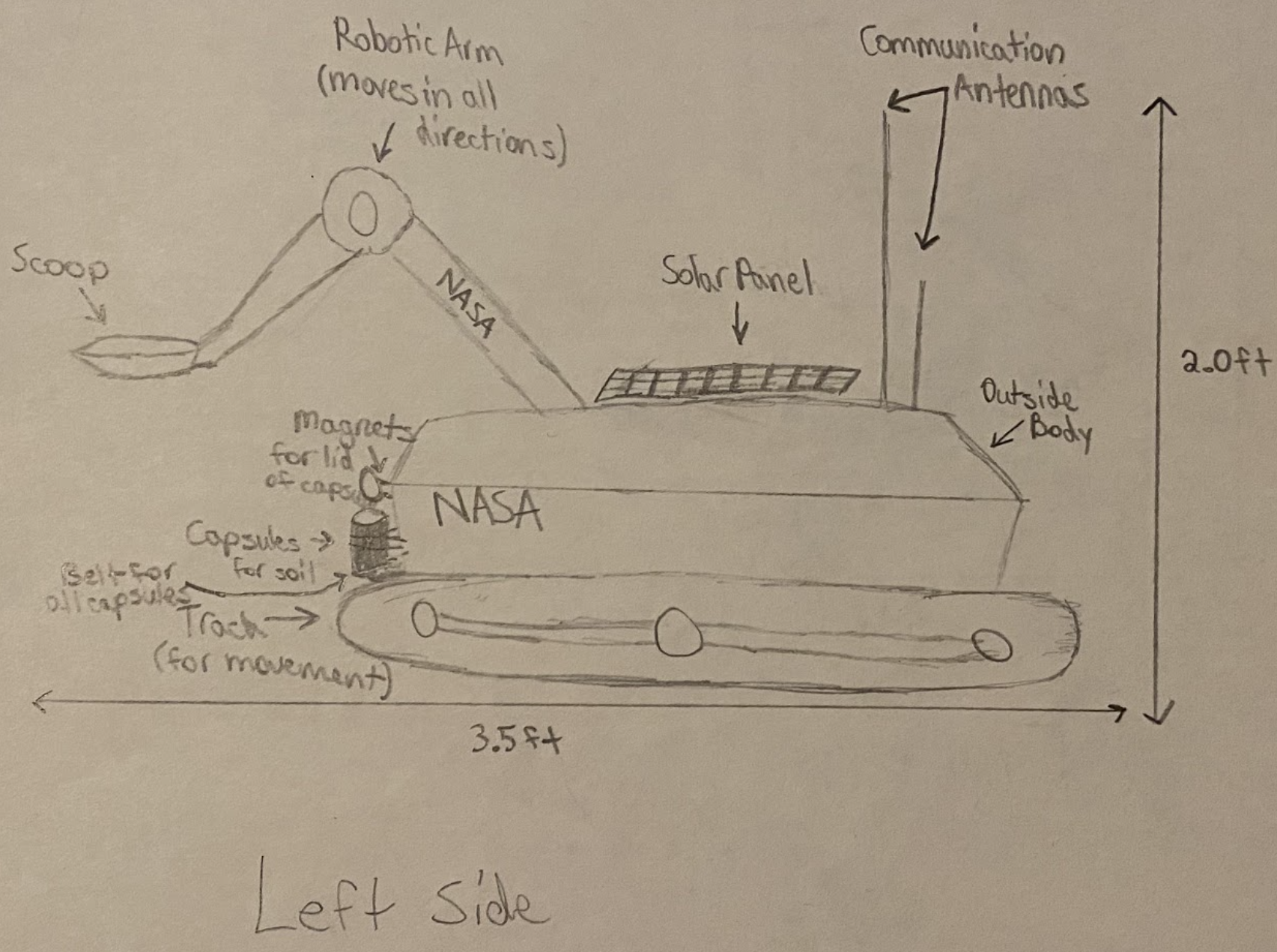
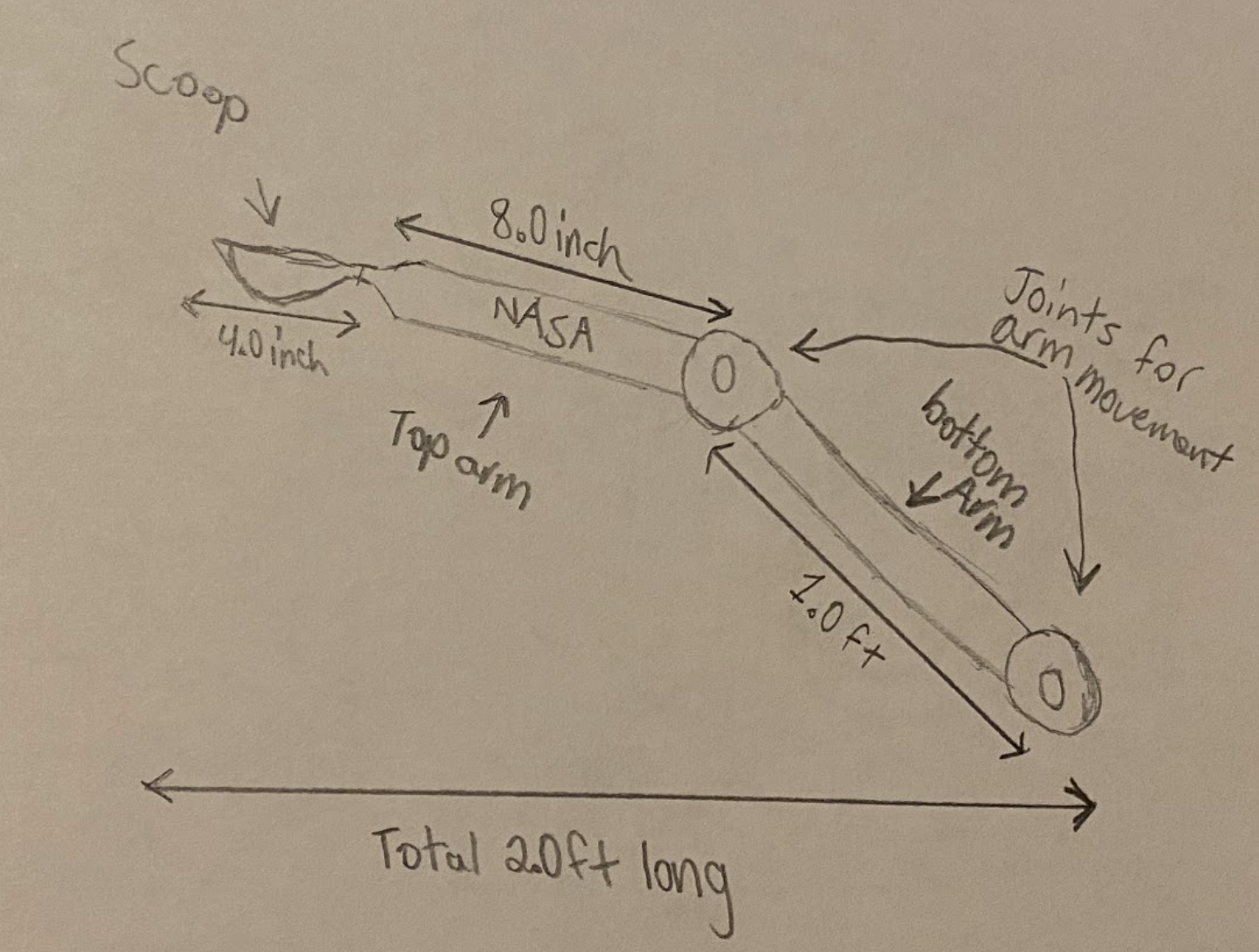
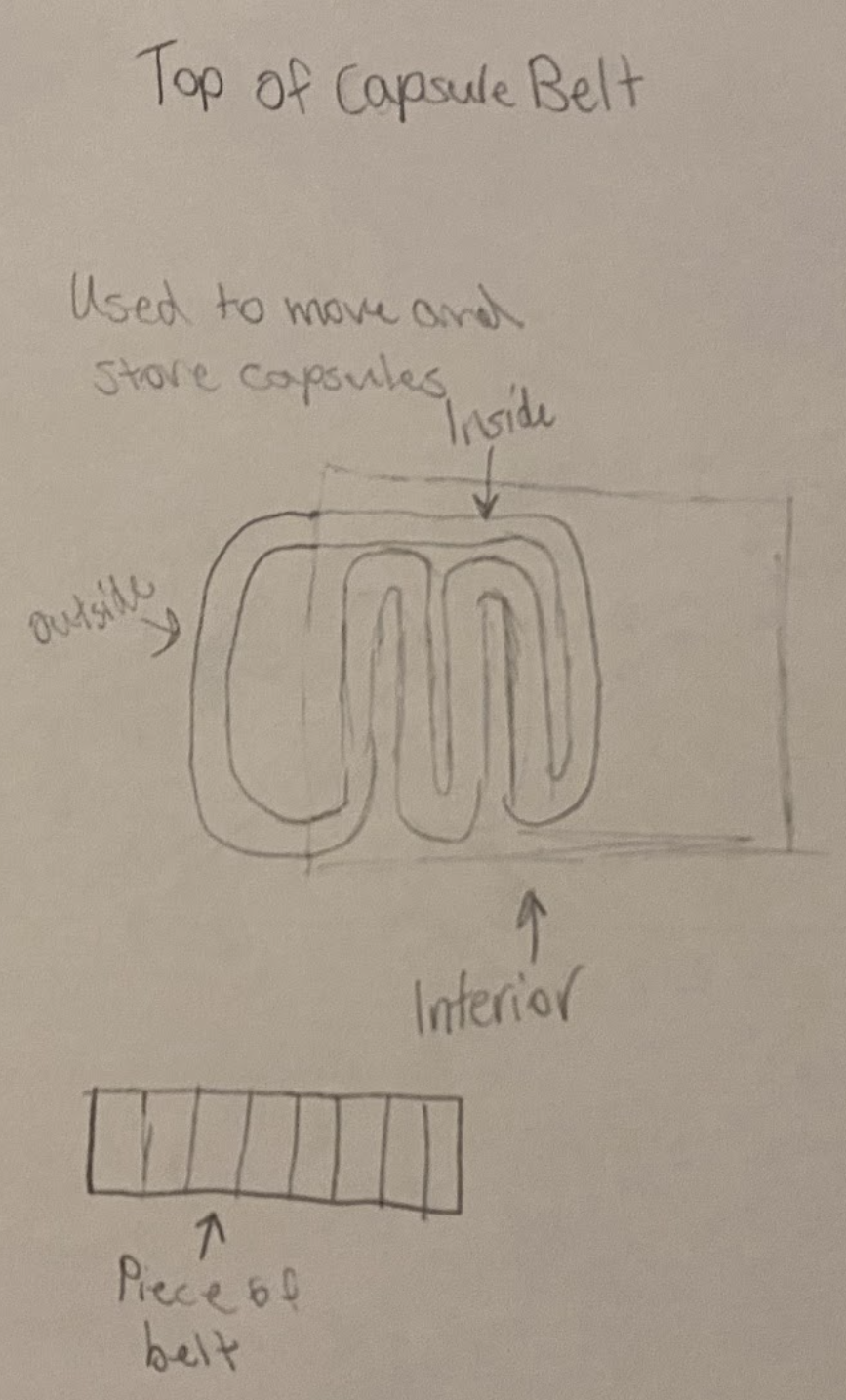
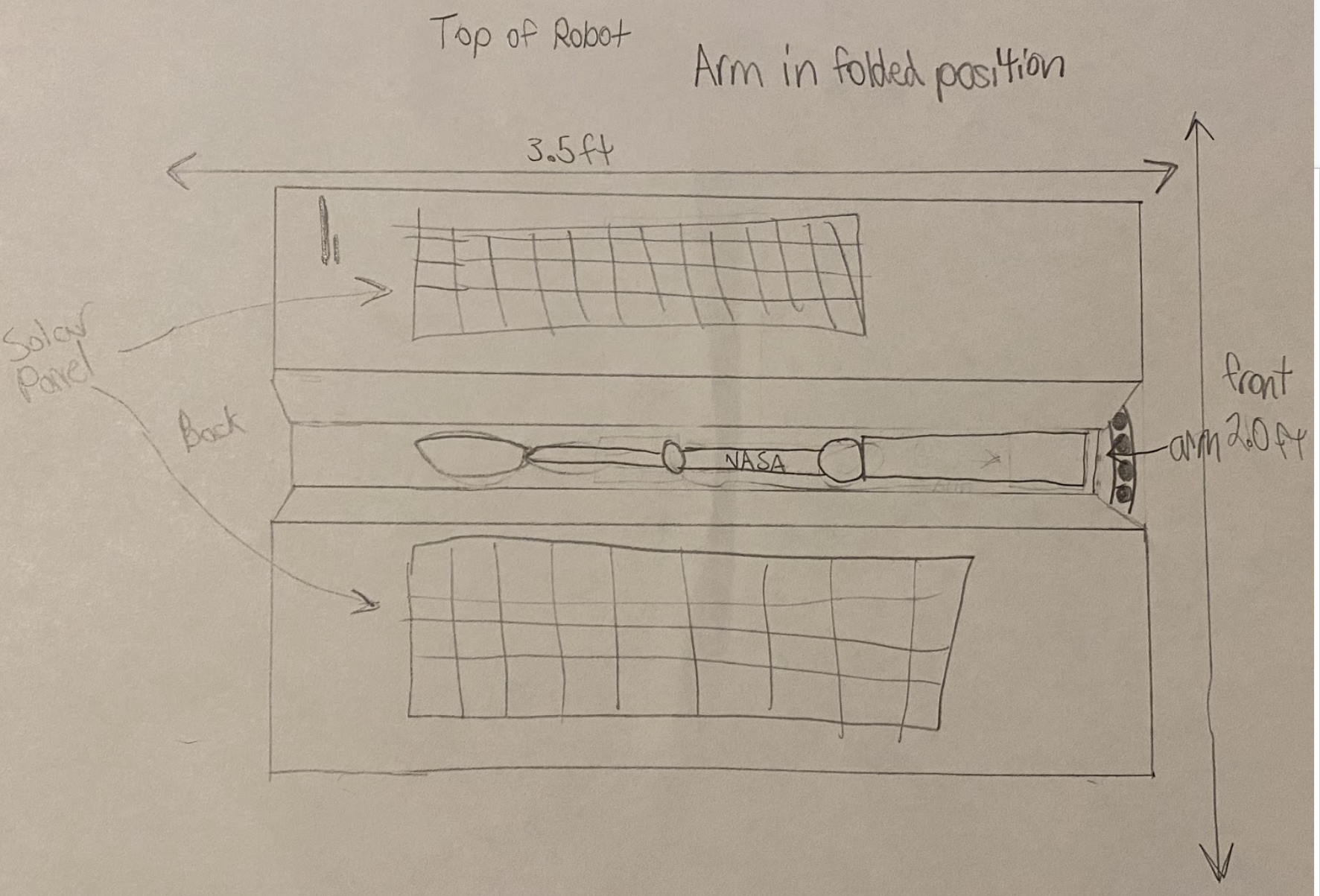
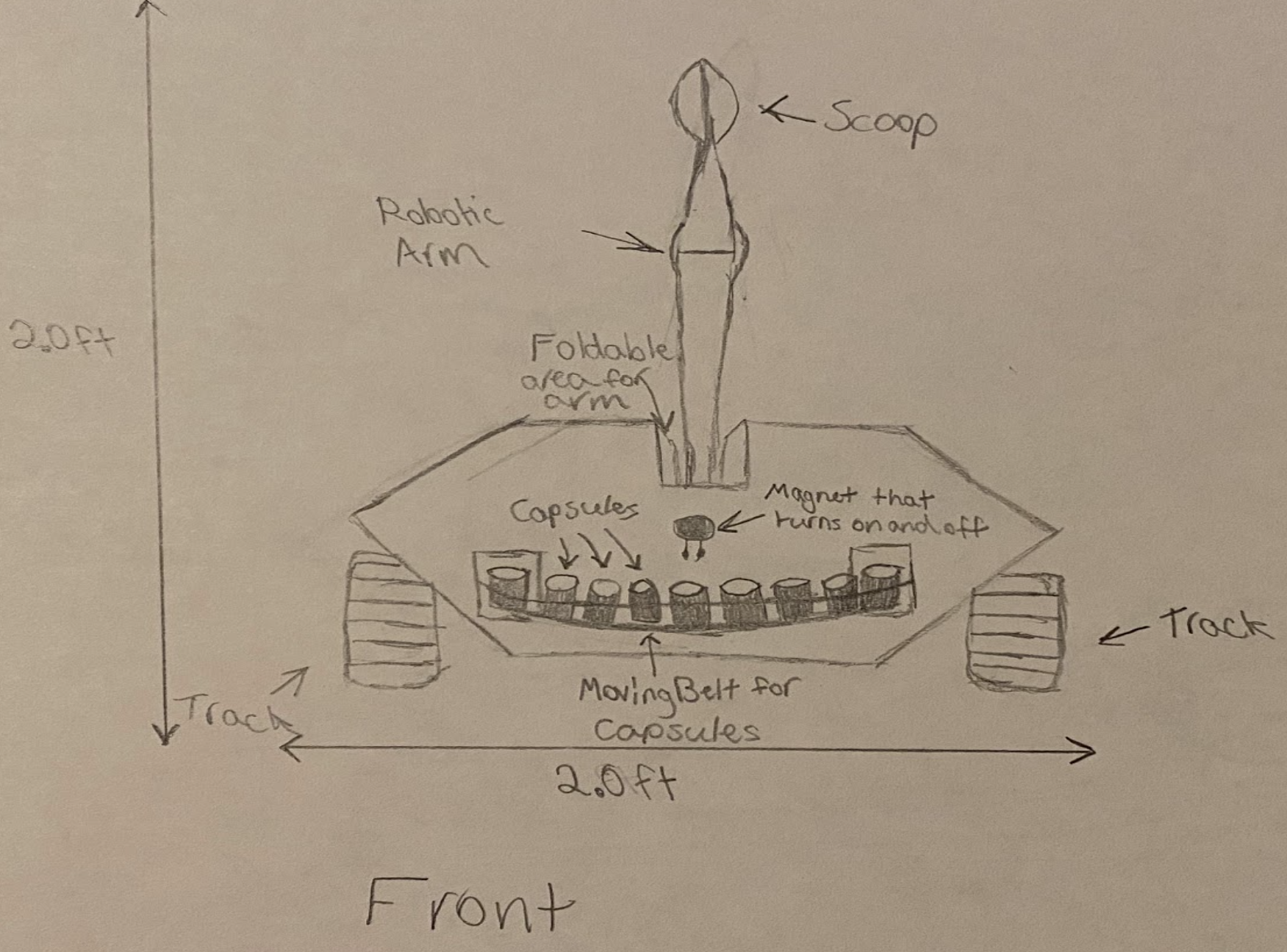
My design includes a robot that has a multi-directional moving arm with a scooper on the end. It would then take the soil and put it into one of many capsules on a belt and it will then be stored internally until getting to a drop off zone. My design would be able to hold many many capsules internally with a moving belt.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org