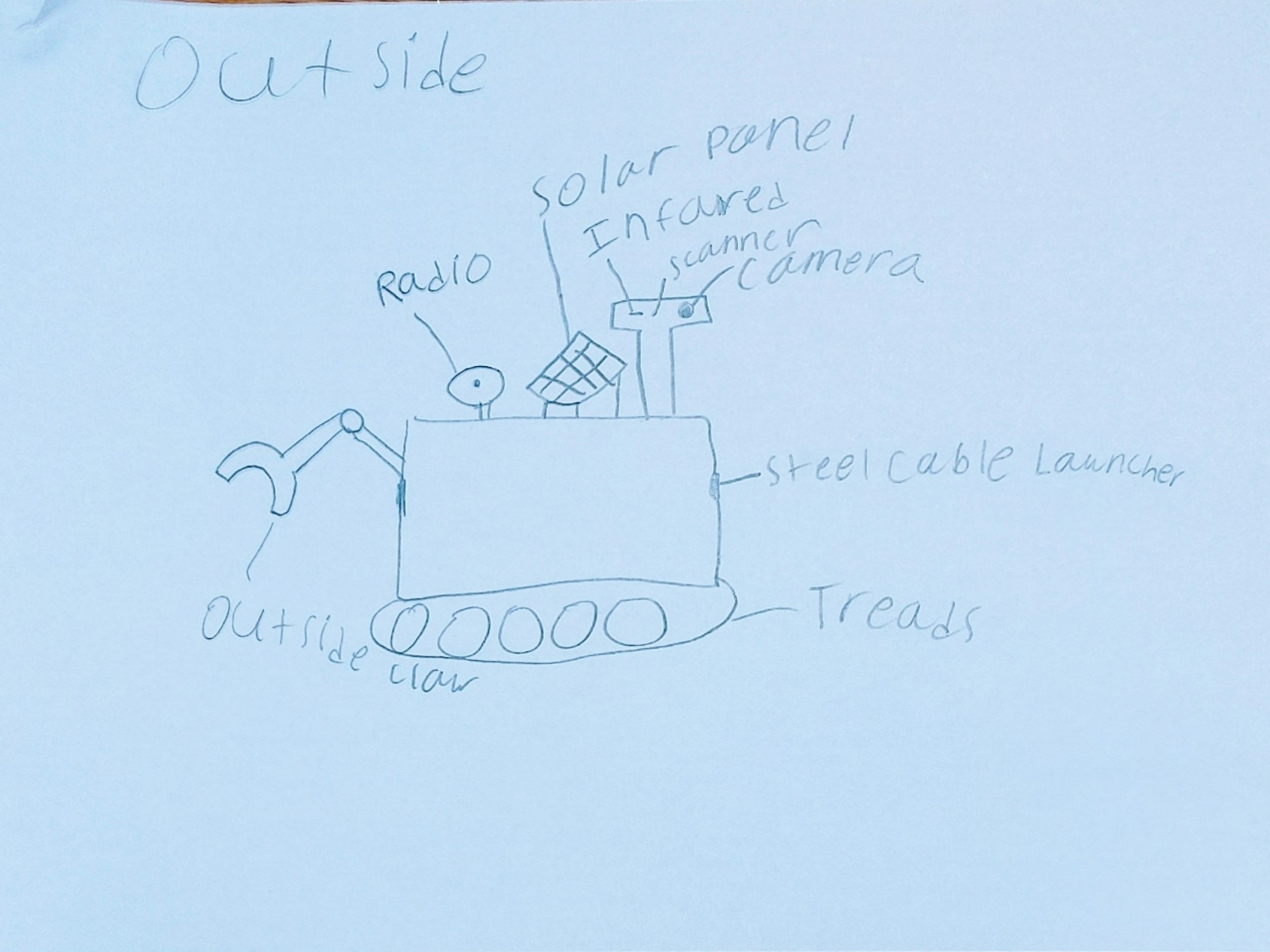
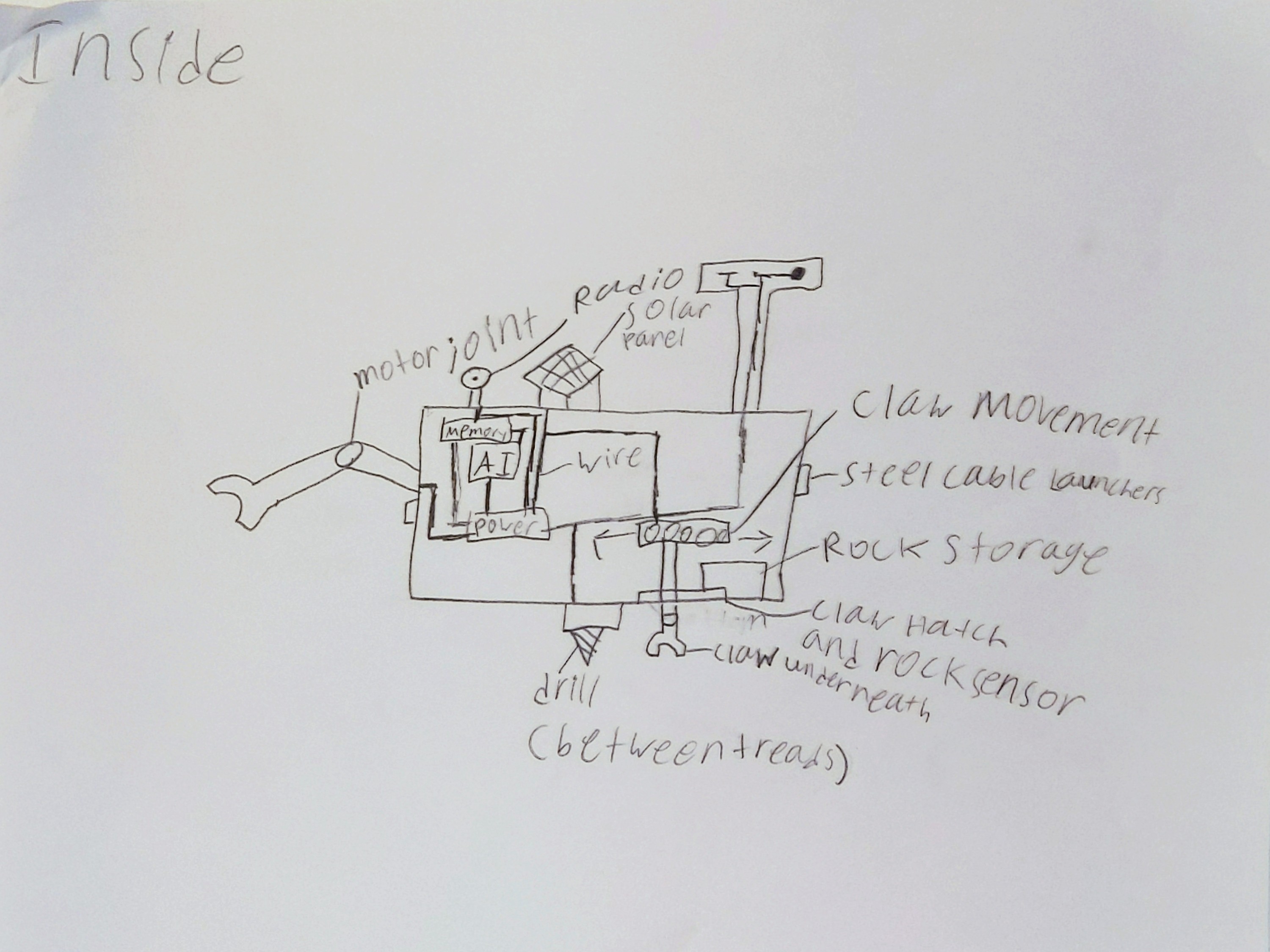
This rover will first find an adequate digging position, based on its pre-programed lunar maps, and eject the steel cables into the ground so that it can stay in place while digging in zero gravity. As it digs, it will log the terrain data it has collected, and send it back to the lunar base. Once it is finished digging, it will collect the rocks with its smaller claw, and put them into storage by sliding the claw along it's tracks to the storage compartment. It can use the larger claw attached to complete maintenance using its AI or controls to help the astronauts at the lunar base. A large amount of cleaning is done after the rover reaches the base to maintain the electronics from the wear and tear of dust. Note to judges: If you have trouble seeing the text in the images please zoom in.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org