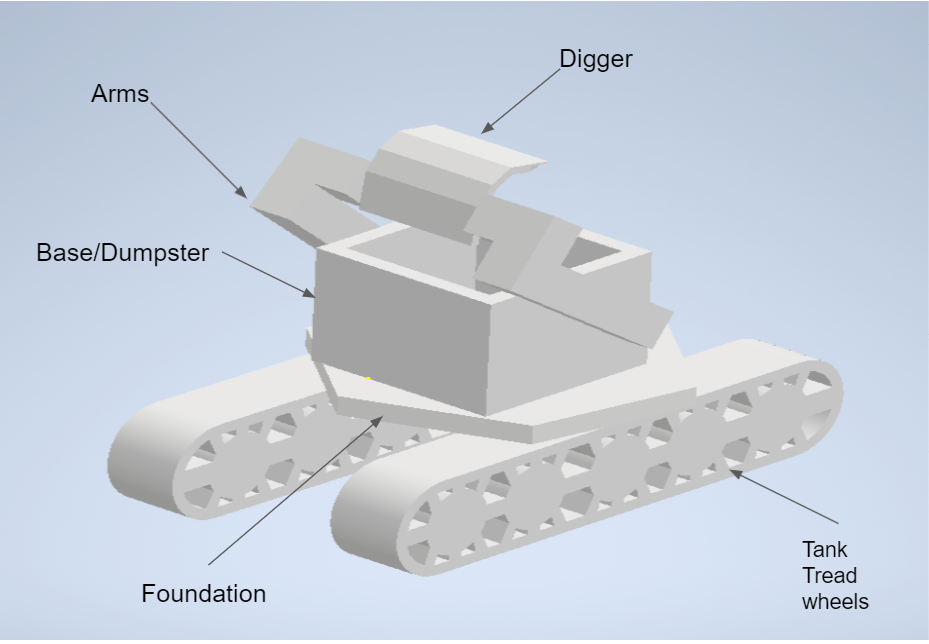
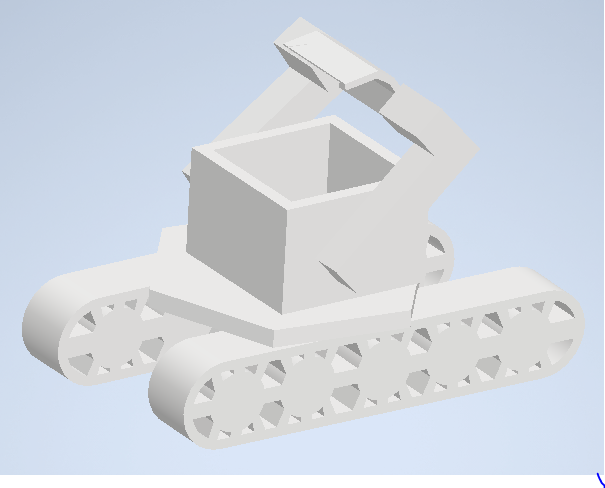
The Enma Hitetsu design is a unique design that will efficiently be able to survive in the lunar environment and conduct its function of digging and collecting lunar soil. The Enma Hitetsu design includes a mobile device similar to of a tank to be able to move through the moons rocky landscape. A base which is also where the soil will be disposed of is located in the middle and two arms are connected to it which then connects to the digger that will dig into the lunar surface to collect the soil. Once it scoops it, the arms will move up and the digger will dispose of the soil in the base. The base is strong enough to carry a good amount of soil per trip. The design also includes windshield wipers for the cameras in order to wipe off the dust and a liquid to clean the robot.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org