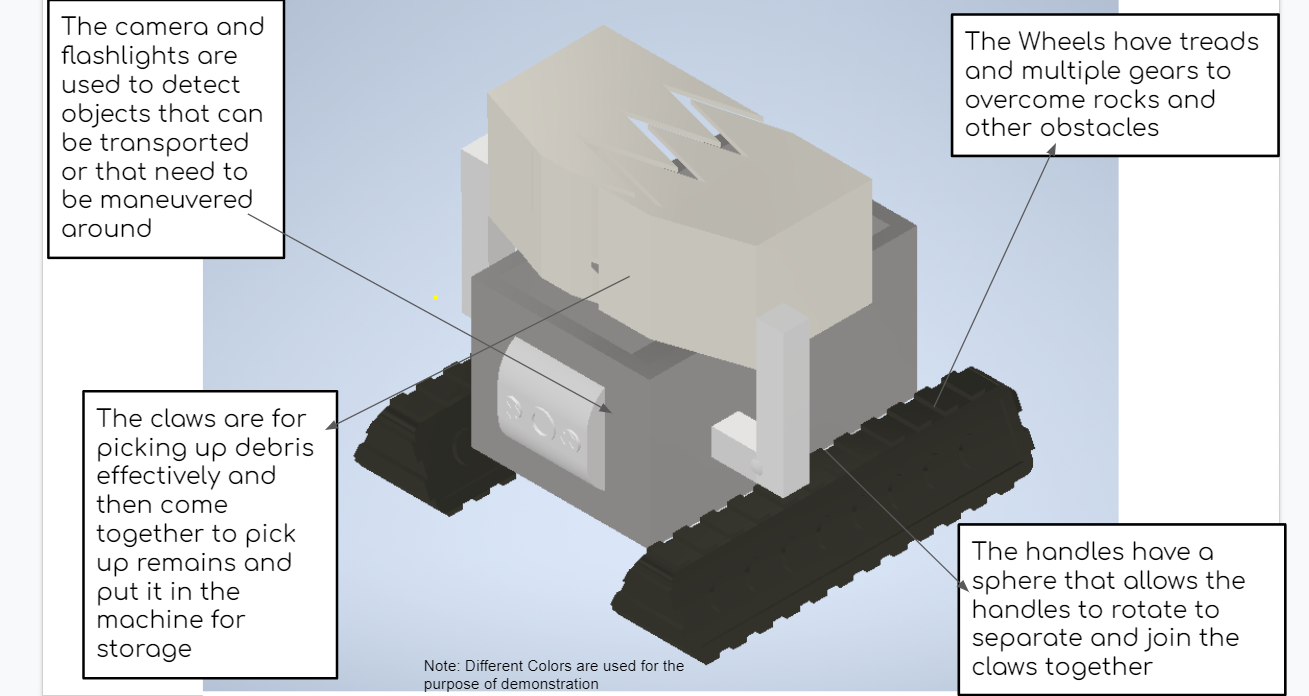
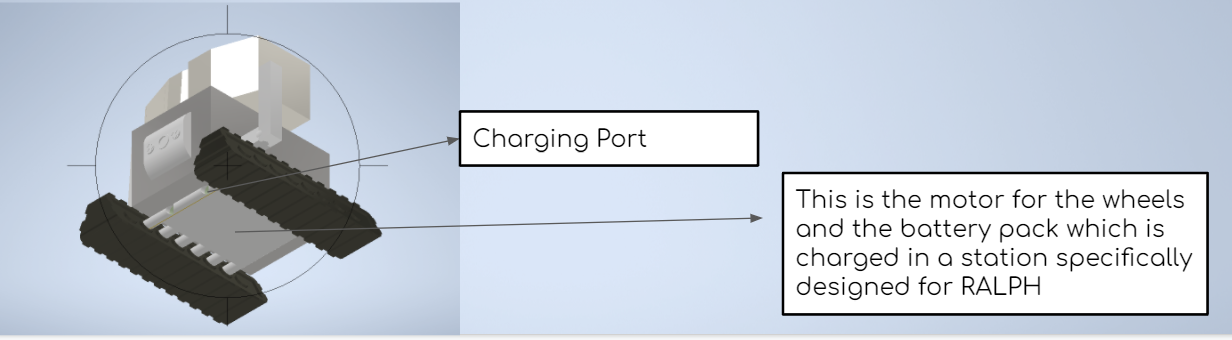
RALPH has treaded wheels which allows RALPH to navigate through the rough terrain. RALPH has a motion sensor, camera, and flashlights which allow it to sense rocks that it can pick up, carry those, to navigate around. The RALPH also has claws which allow it to mine and transport the regolith easily. I believe that the most efficient way to transport the regolith is to have a small robot that can transport the regolith often. With a heavy lifting robot there could be unforeseen technical issues that could affect the robot negatively which is why I chose to have a smaller robot with less of a load. RALPH is designed to withstand most lunar obstacles including lunar dust which is why it has the high powered flashlights, the motion sensor, and the battery is encased. It also removes the lunar dust by vibrating.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org