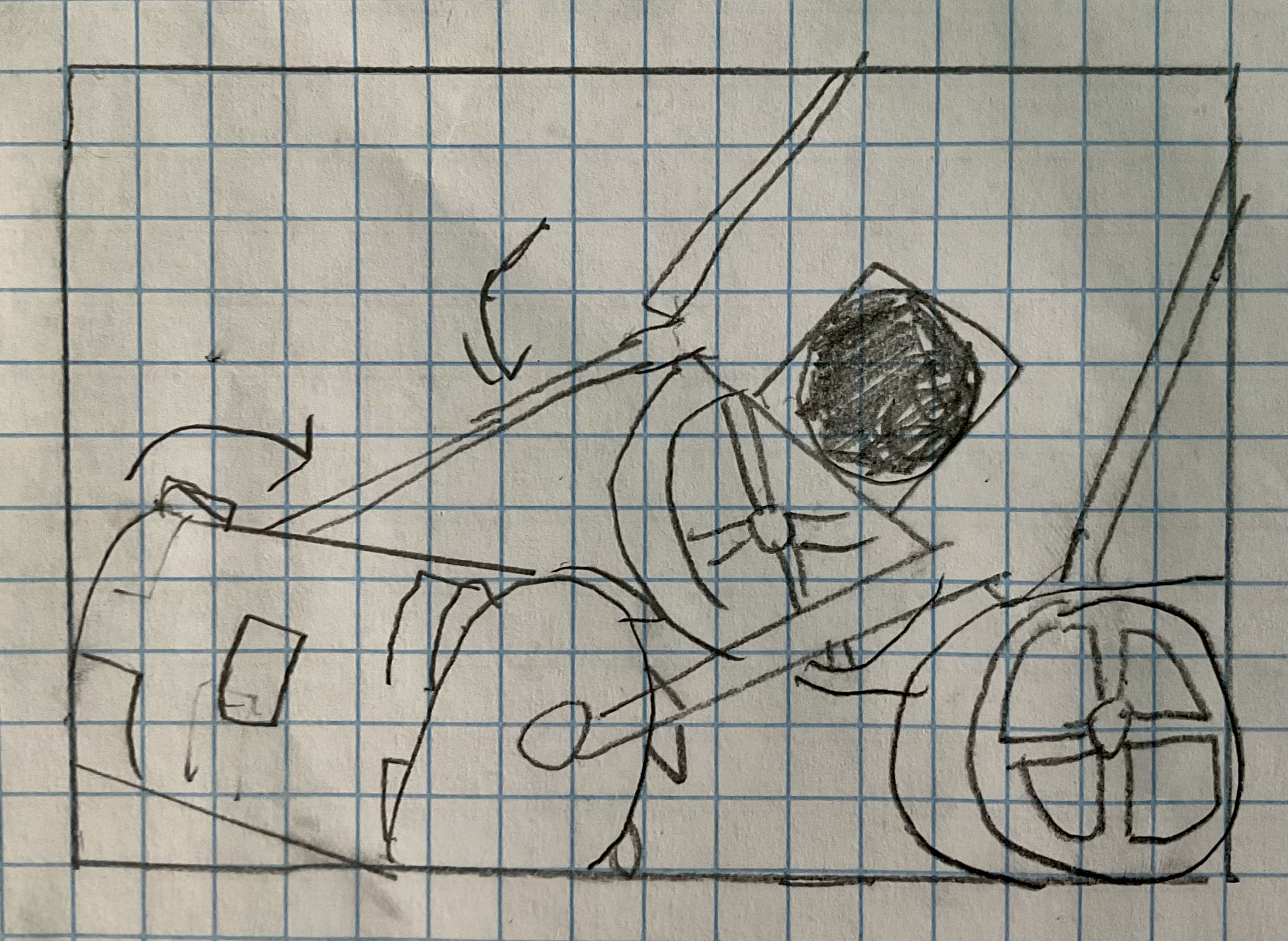

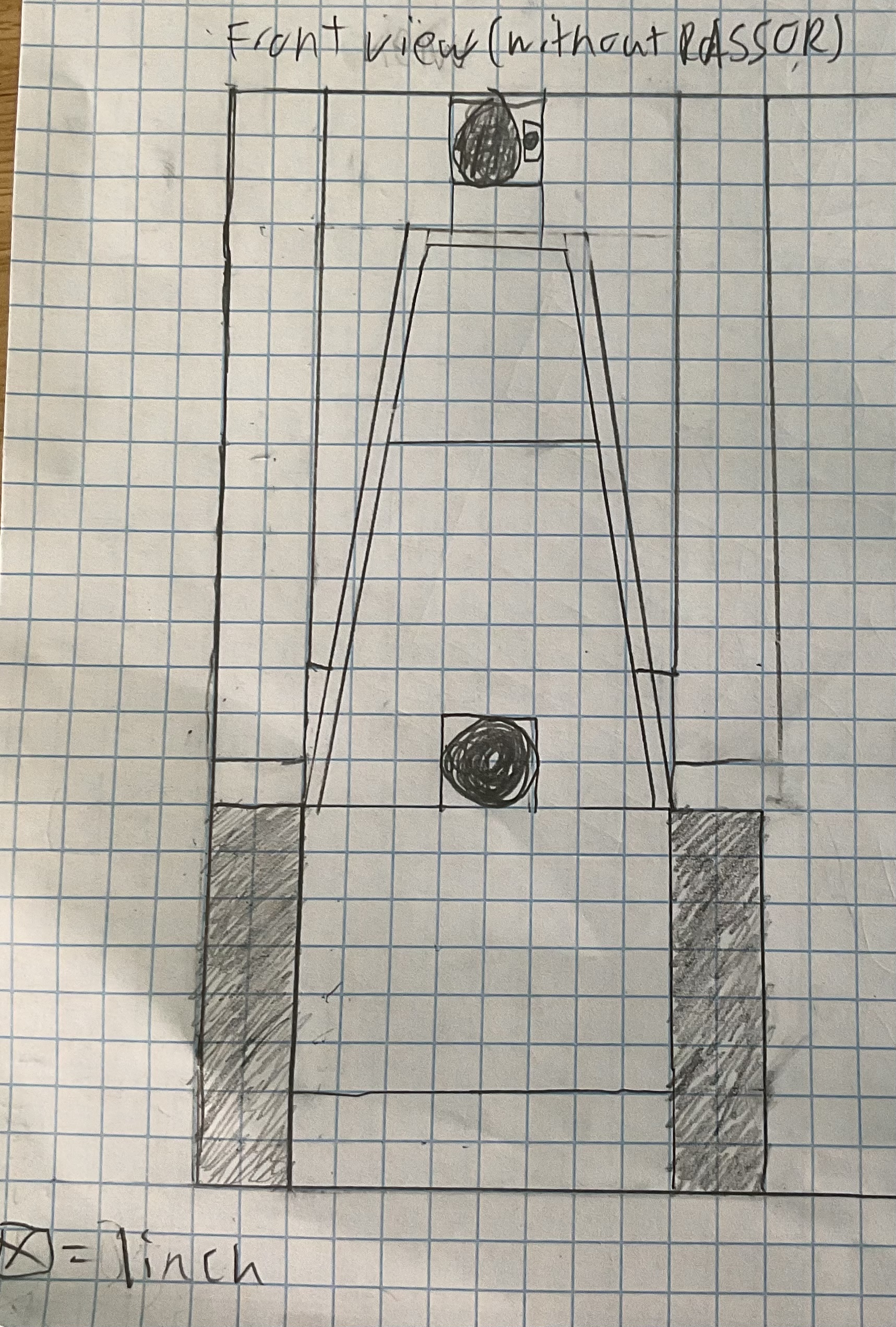
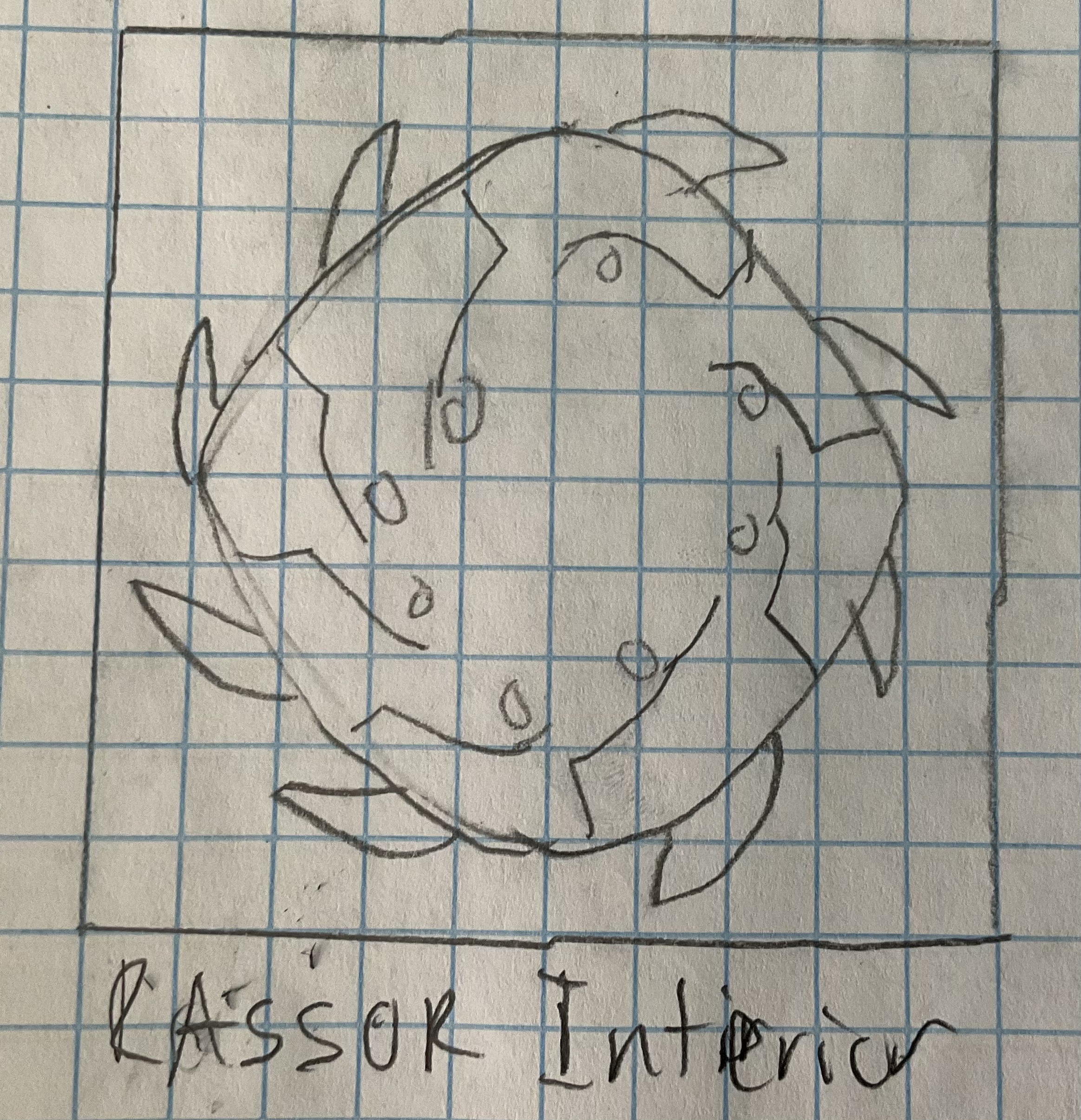
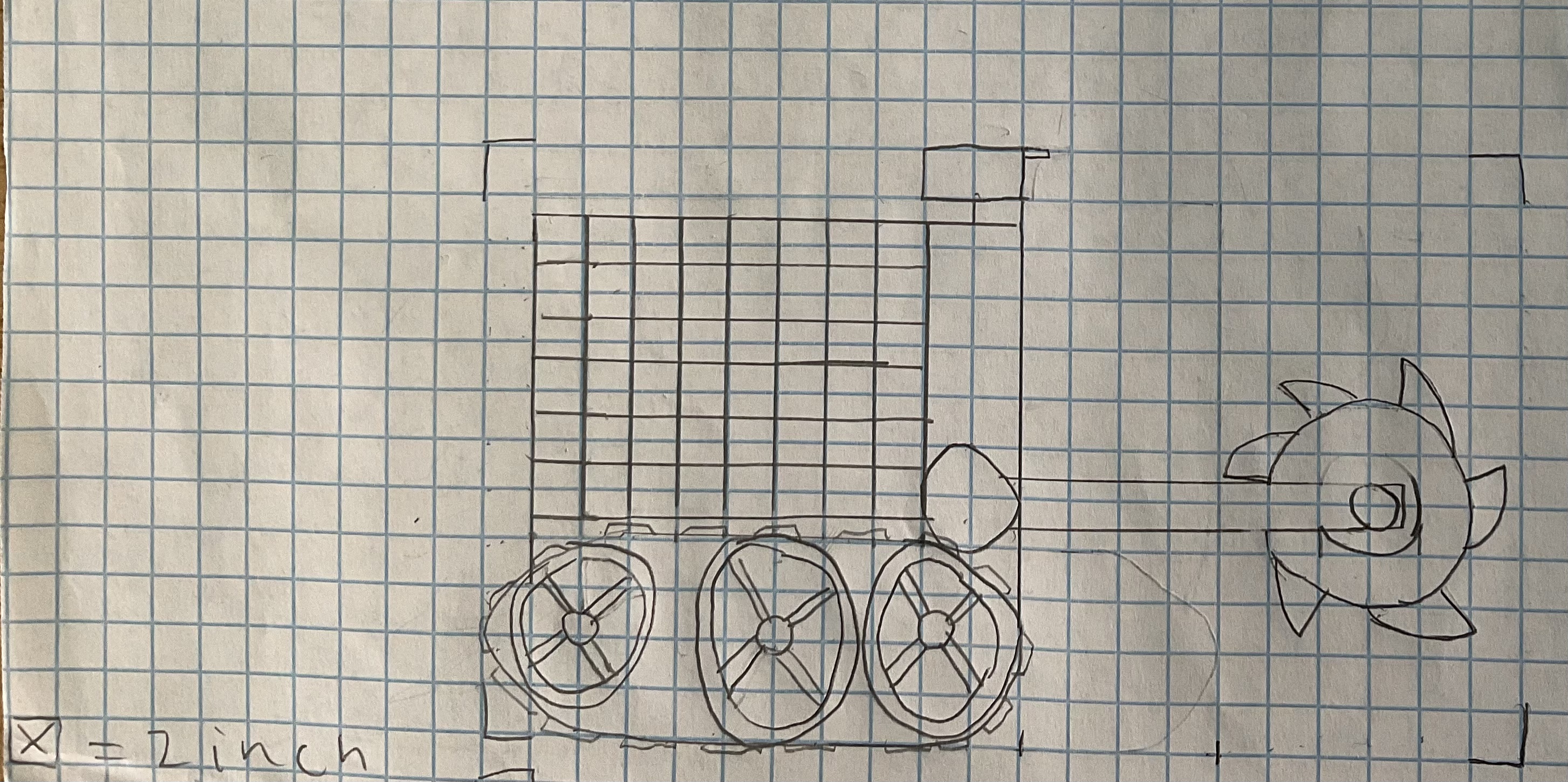
The robot is designed to carry more dirt per trip because of the many challenges and uncertainties of the moon. The robot will only function for a limited time and the potential for breakdowns or mechanical failure makes it imperative that the robot is most efficient with dirt collection. The robot uses the RASSOR low-gravity excavation system utilizing a spinning drum with scoops built in to collect regolith. The force caused by the treads on the robot counters the digging force of the drum allowing the robot to dig in low gravity situations. The interior of the drum stores the dirt. The robot is coated in a paint that contains thin films of indium tin oxide to dissipate the electrical charge of the dust. The frame of the rover has wires attached to allow charges to be sent, causing dust to fall off because the charges are not parallel.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org