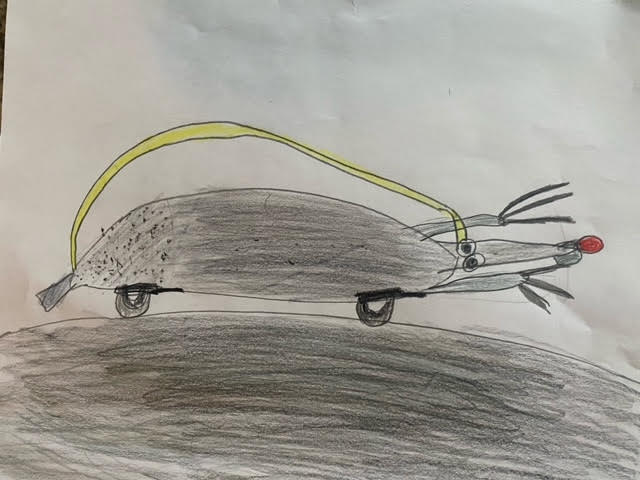
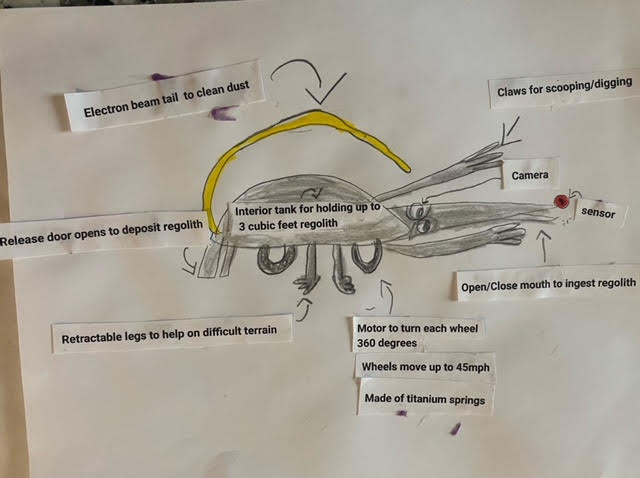
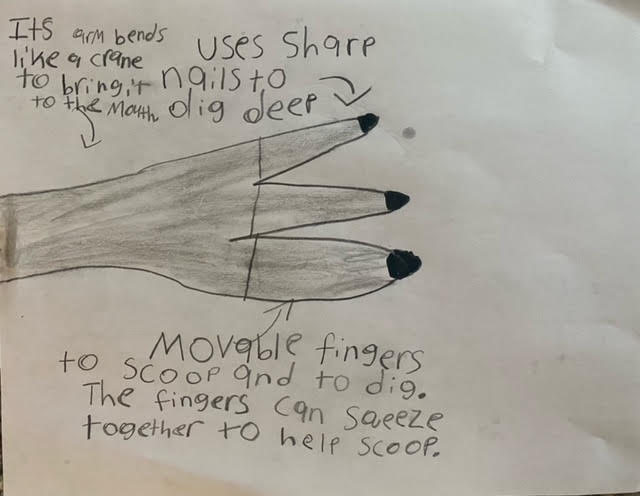
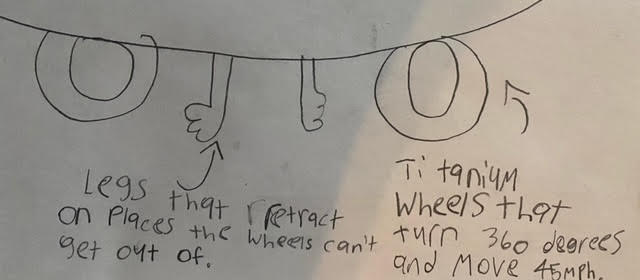
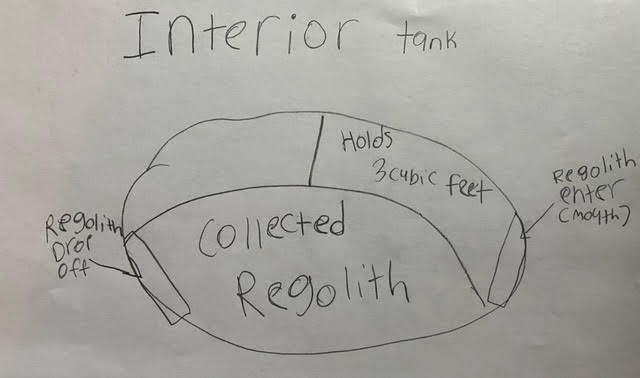
My design is Mega Moon Mouse. My robot moves regolith by digging and grabbing with claws. It pulls it towards its mouth where it is stored in its interior tank. It can hold 2-3 cubic feet at once. When regolith needs dropped off there is a release door that opens in the back. To deal with lunar dust an electron beam comes out of the tail and cleans surface of the mouse. Its eyes are cameras, and its nose is a sensor. It is 3ftx2ftx2ft. The moon mouse has wheels made with titanium springs that turn 360 degrees moving easily on lunar terrain. It also has retractable legs that come out and help if mouse is going through rough terrain. It charges by using a wireless charging station, with solar panels for back up. Mice are great at digging but the moon mouse is the ultimate digging and collecting robot.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org