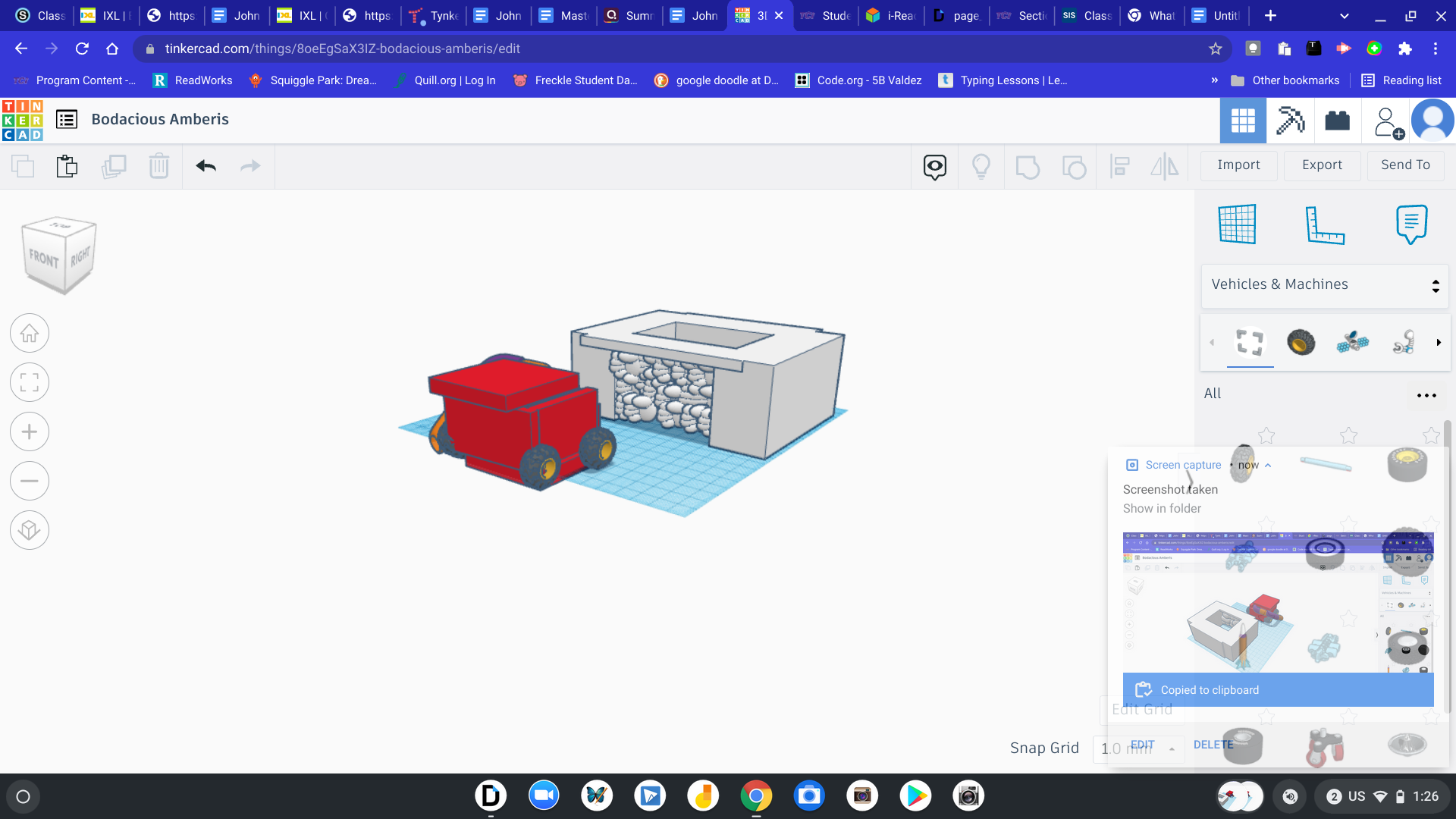
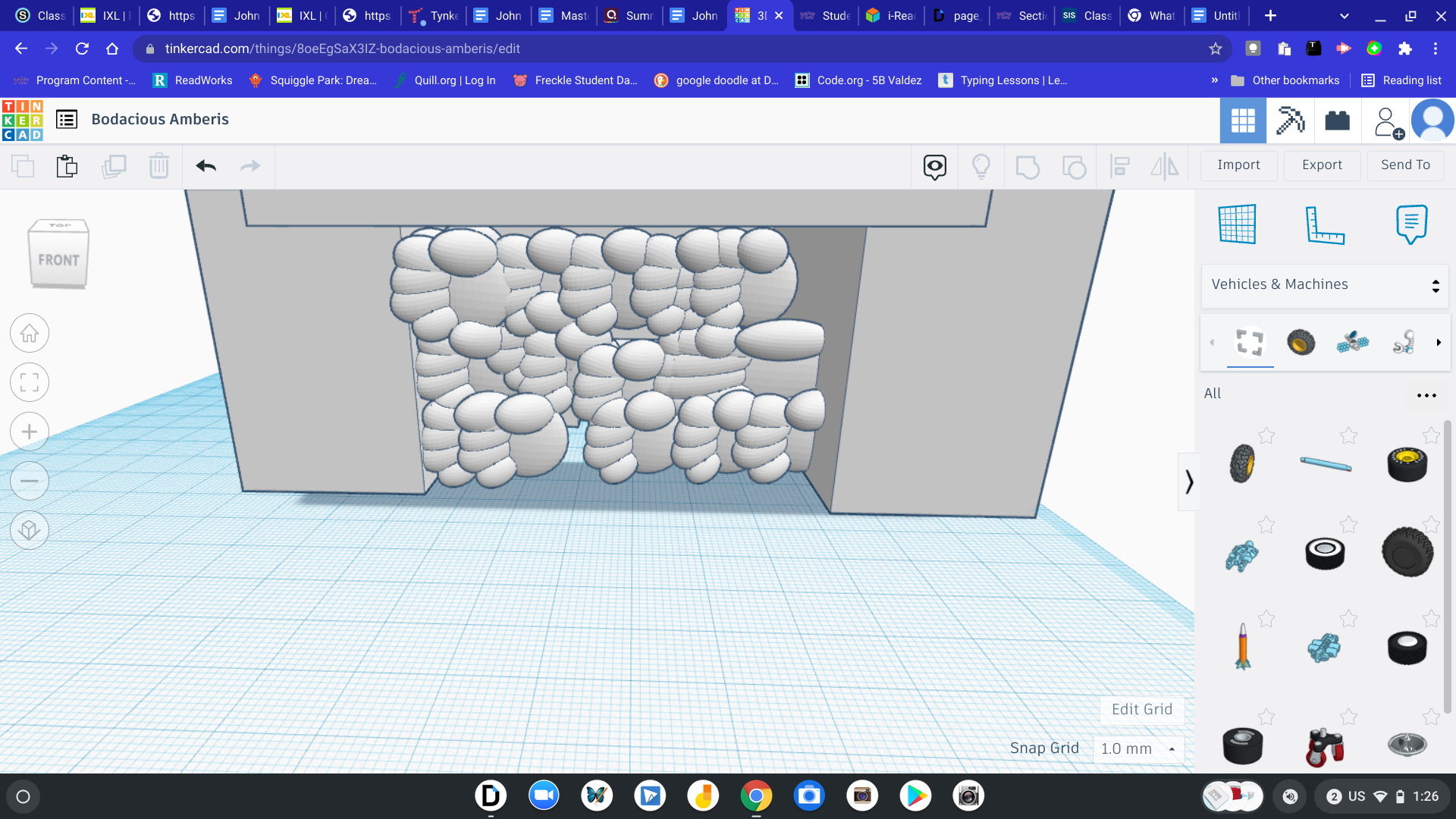
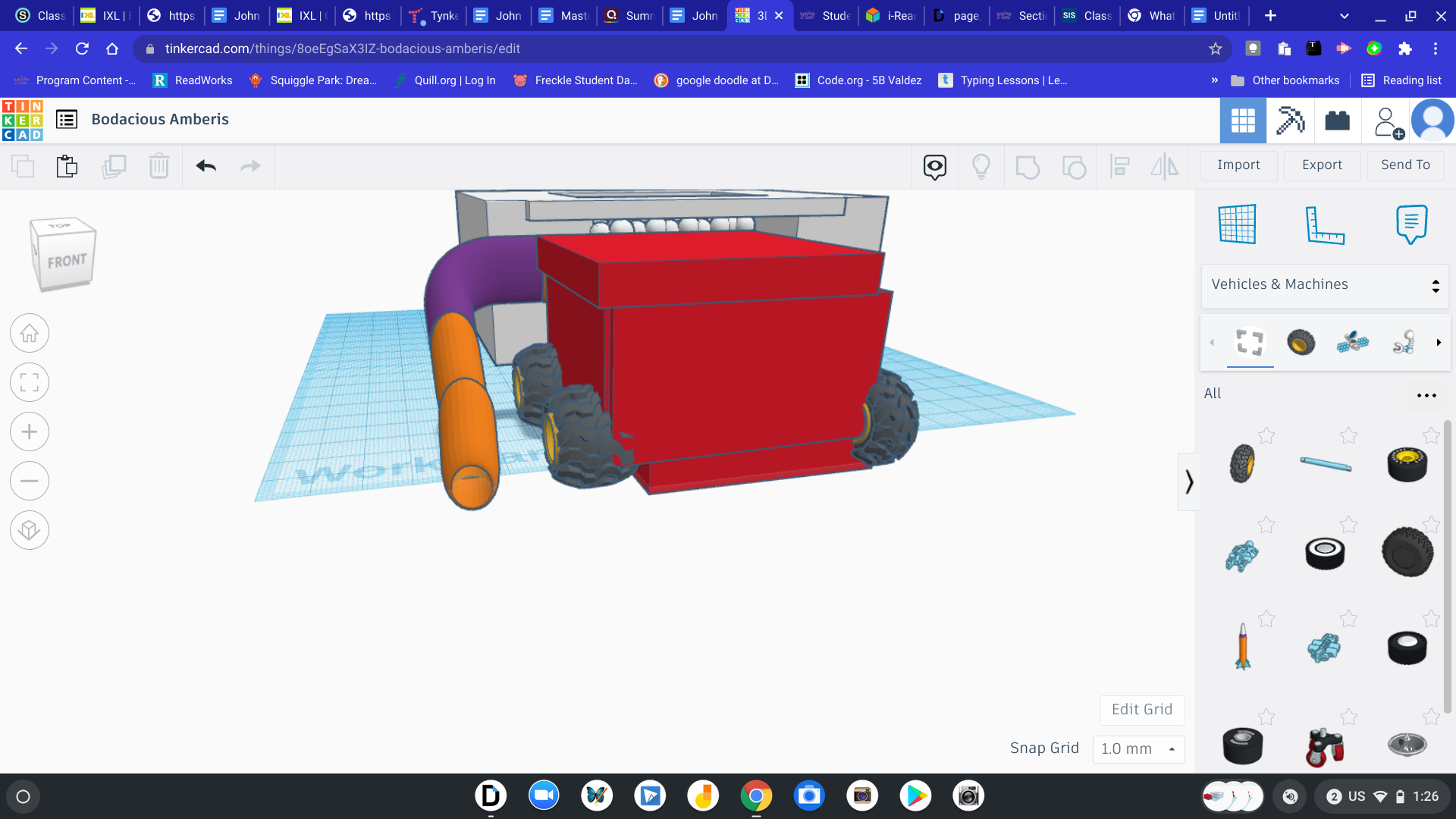
Physical design
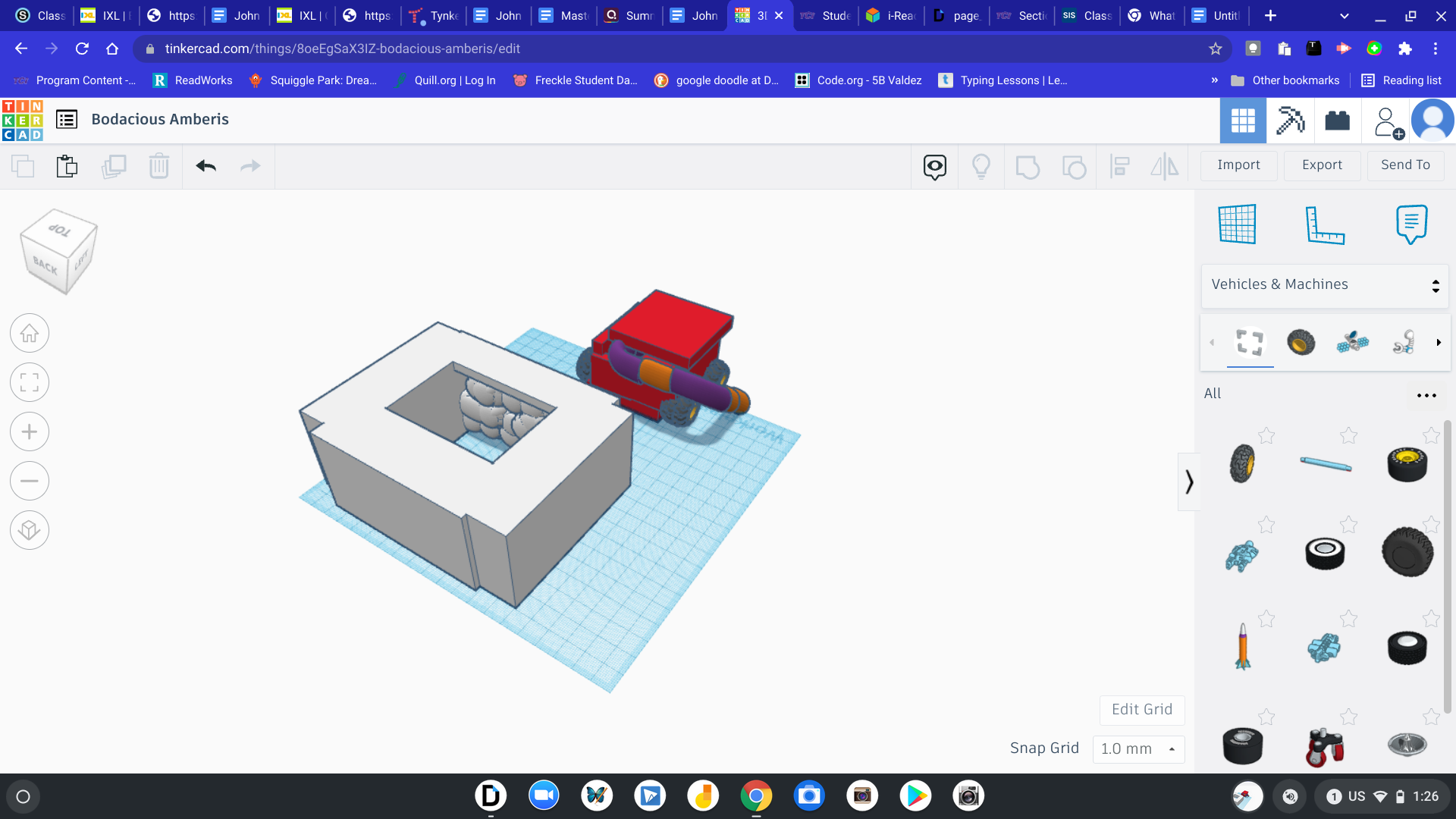
My robot will be like a vacuum and will scoop the regele up and when it is all crumbled up it will suck it all up and will go into the box where my robot is.
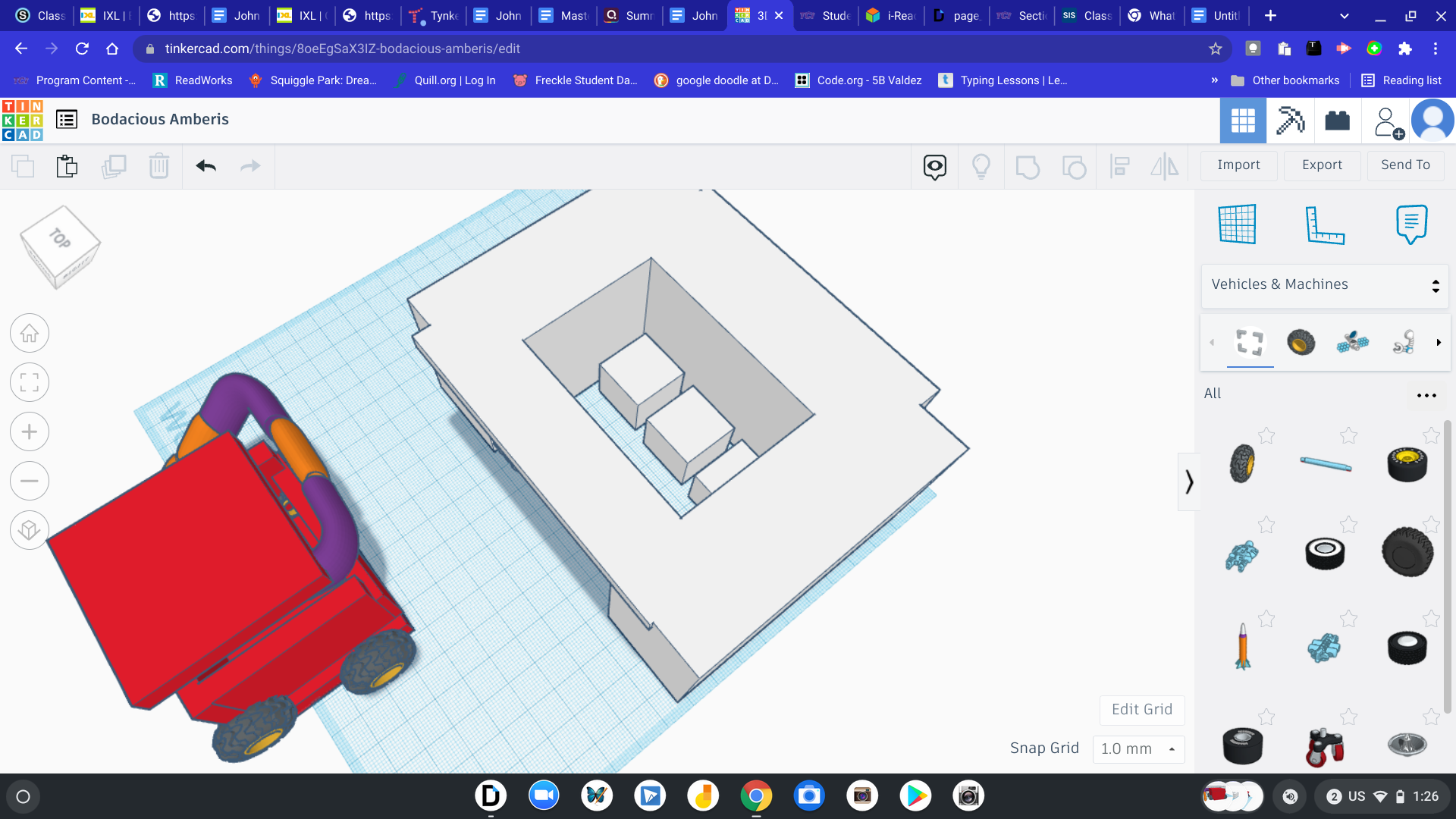
Operational design
Mine will carry more than most at a time because it is going to be a big box connected to the vacuum that sucks it all up.
Dealing with dust
When I go back to a small base camp there will be white fluffed up cleaners that will clean all the lunar dust of the robot so it can stick to the fluffed up cleaners instead of my robot.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org