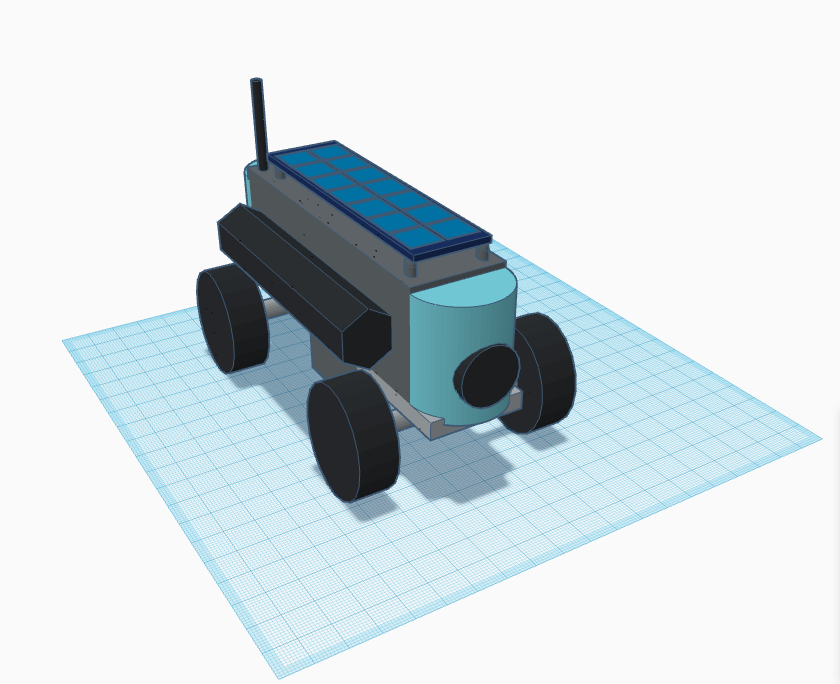
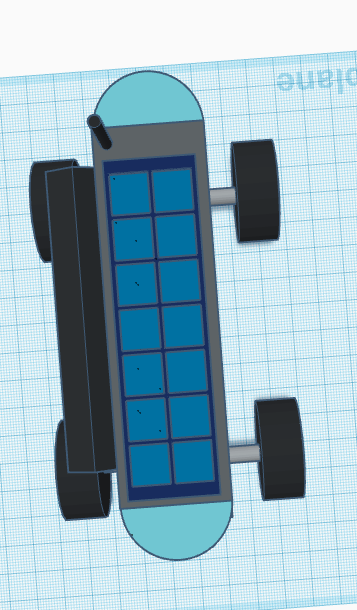
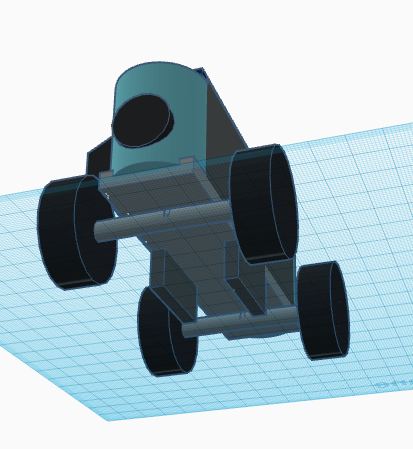
The wheels on my robot must be very adaptive as the robot will need to travers many types of terrain. The wheels are actually Mecanum wheels, they are able to drive sideways and are much more cheap and reliable than a normal air filled wheel, and being made of plastic they can not be popped. The dust that is on the moon can usually get stuck in circuits and messes with systems. This can be solved by the dust containing iron, which can be dispelled using negatively sided magnets. The underside of the robot will have a sort of dual spades that have been turned to point at each other and enclose on any material needed. The spades can also lower downwards and rise upward to grab differing heights of material and adapt to different ground-levels. I have made an added solar panel and a large storage area for samples.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org