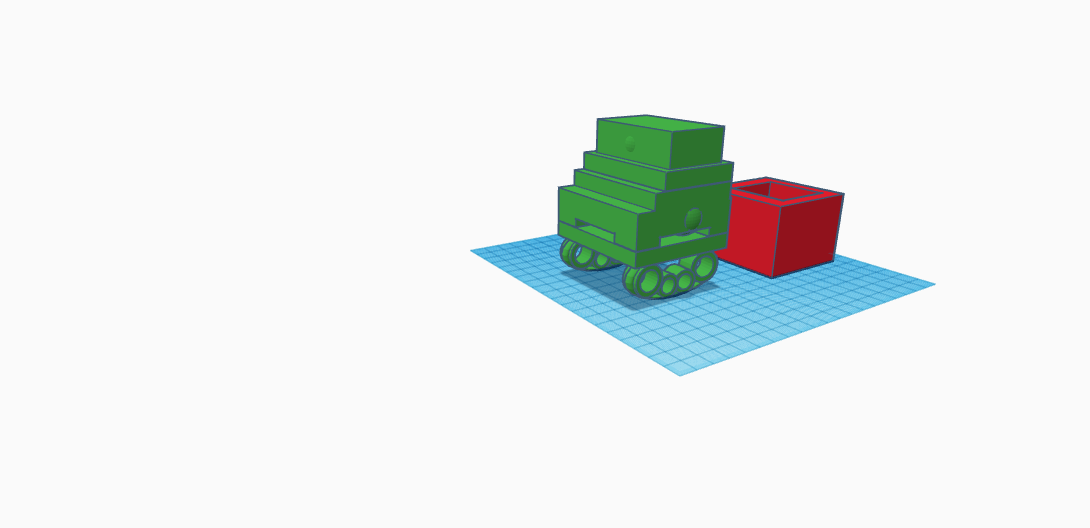
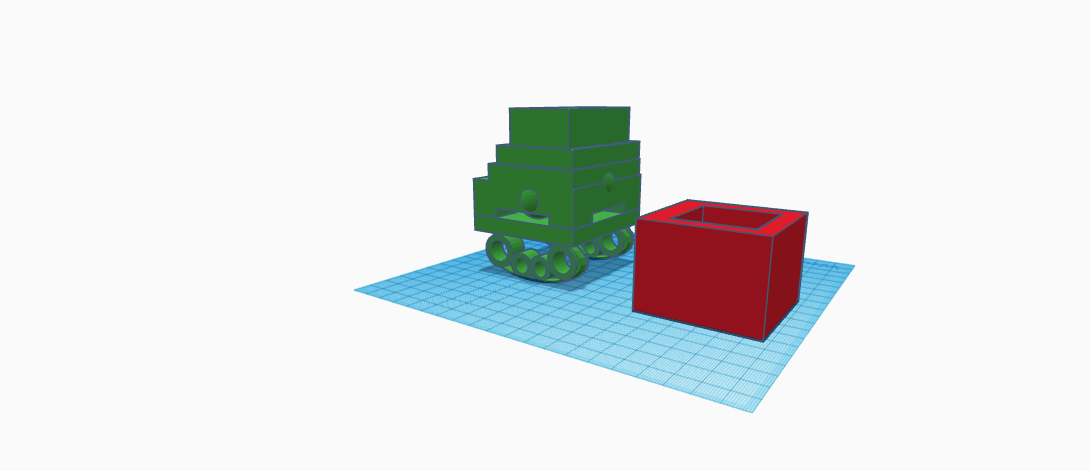
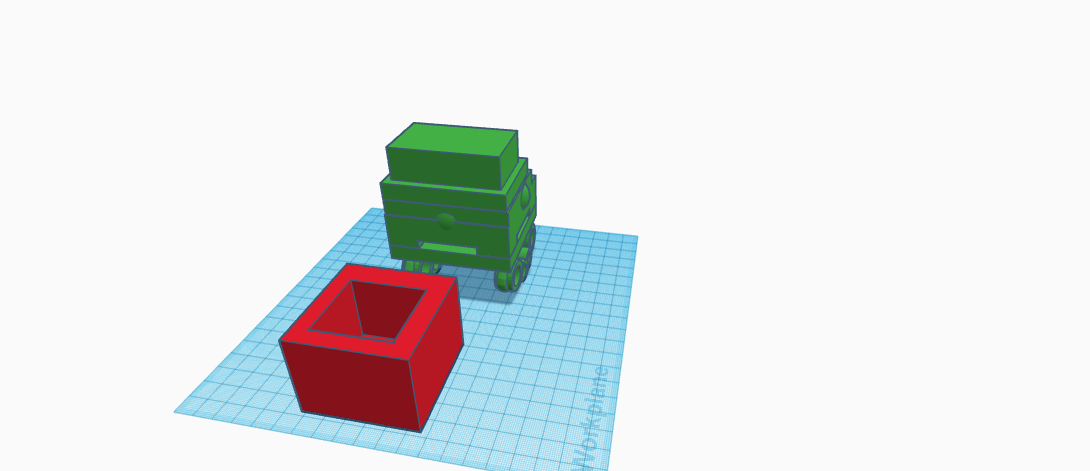
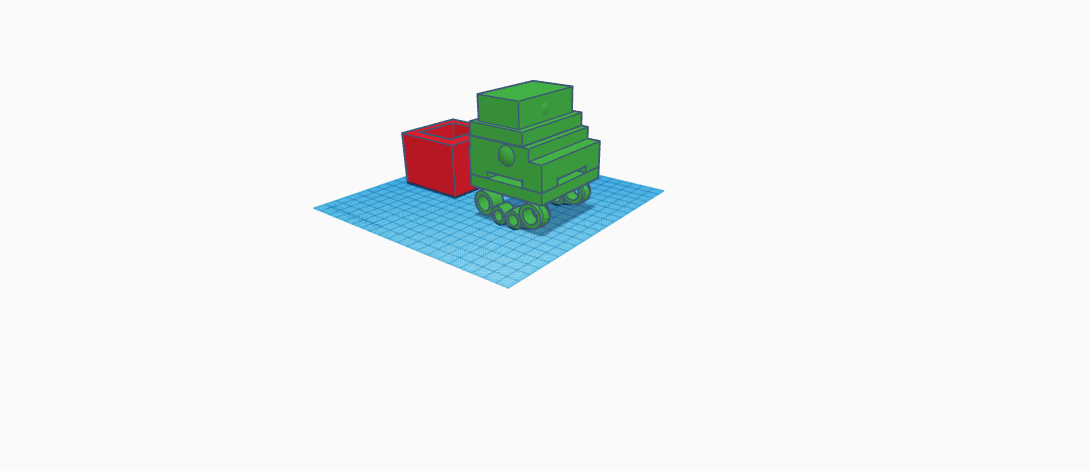
Physical design
The robot will have vacuums on all sides to collect the moon regolith and it will have a bucket inside the robot to store the regolith.
Operational design
The robot could hold half or a lot of regolith on the trip depending on the size of the bucket and the weight. And it also depends on the size of the robot. If there is too much weight the robot could probably slow down and could get stuck on obstacles.
Dealing with dust
The vacuum could also work as a blower pushing away regolith that could stick to the wheels and maybe you can control all of them each to push and vacuum the regolith.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org