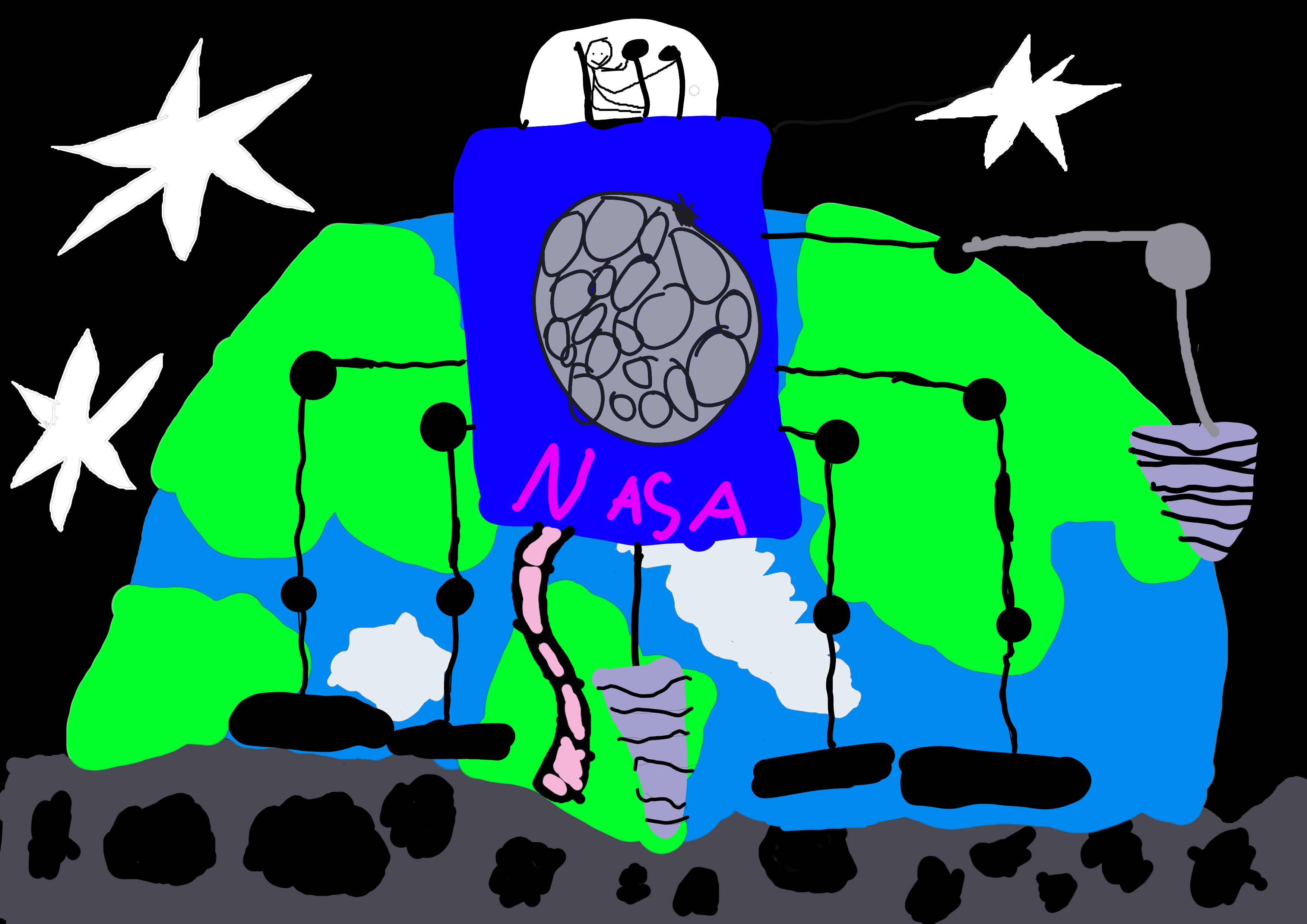
I invented a 3-robot team for regolith and water mining on the Moon. My transport robot walks instead of wheeling, to protect moving parts from dust. The leg joints are covered with special spheres that do not let the dust in.
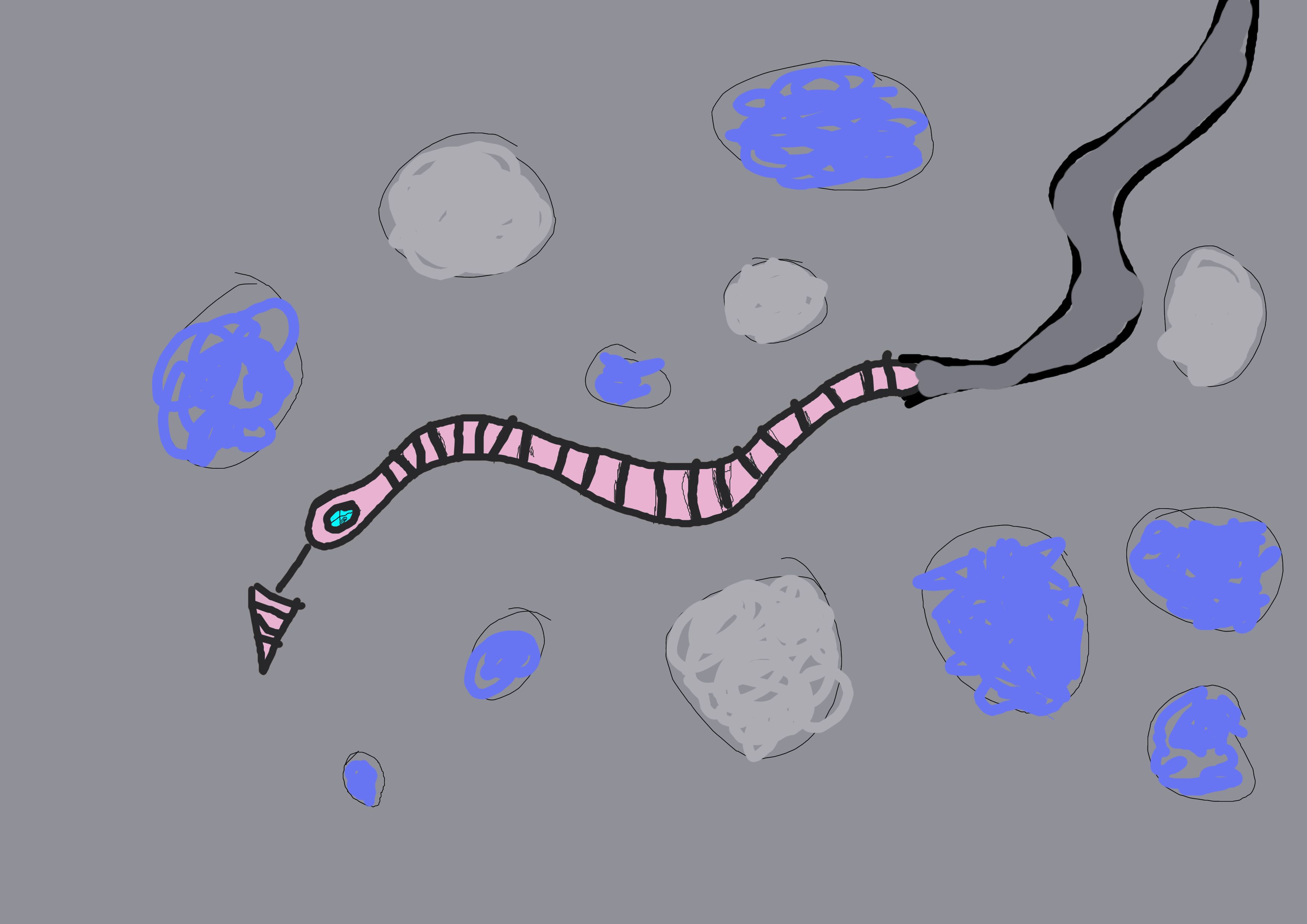
The robot has two drills for close digging. For deeper digging, it has 2 robots inside, Lunar Worms. When released, Worm-1 digs into the lunar soil and stays under. Worm-1 has a drill in front and it stores the regolith inside its segments. It also has water sensors, which save the location of water sources and send them by radio to a smaller Worm-2, which then uses its path to get to water.
Once their segments are filled, the robots unload onto the main robot, which walks to the station. In the meantime, the Worms dig, and have another load by the time the main bot comes back.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org