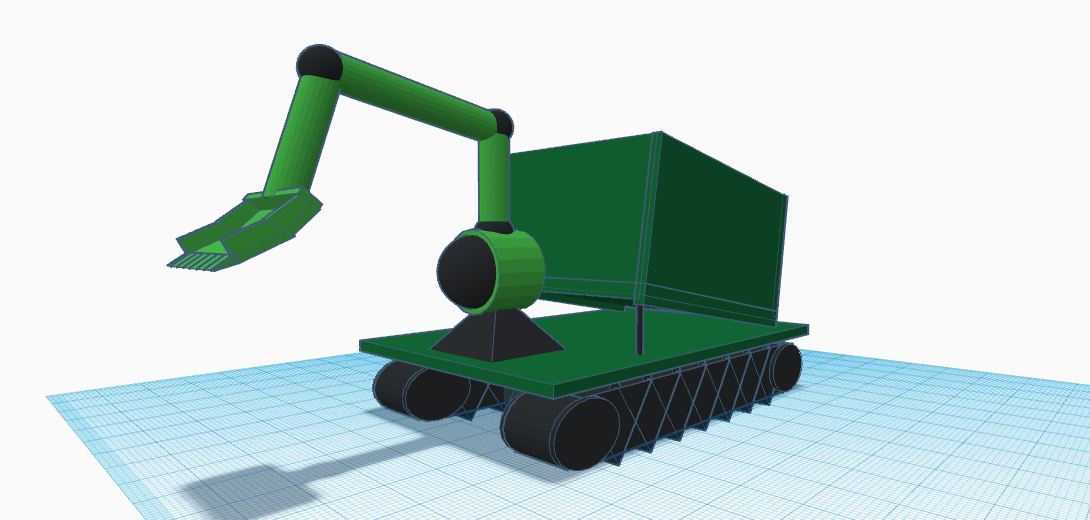
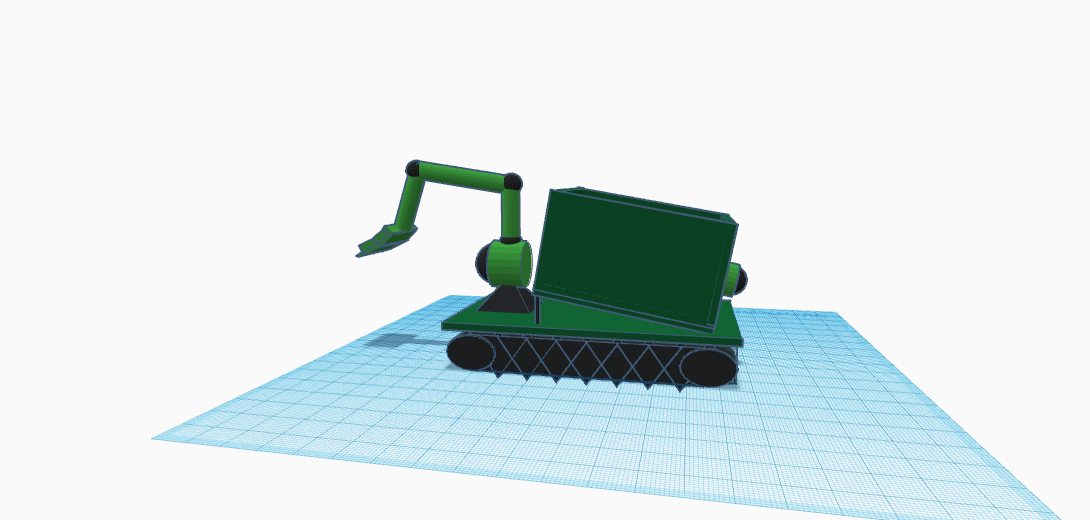
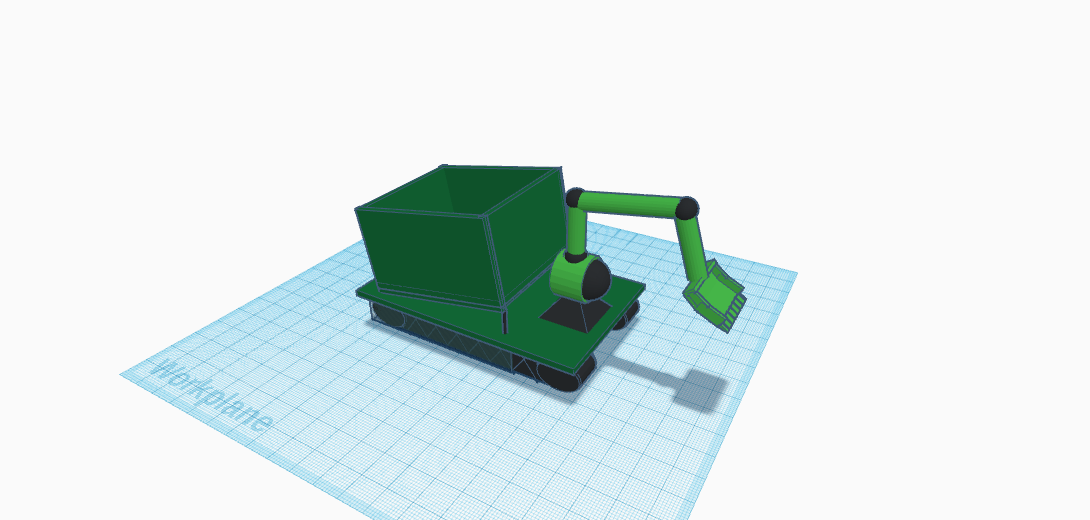
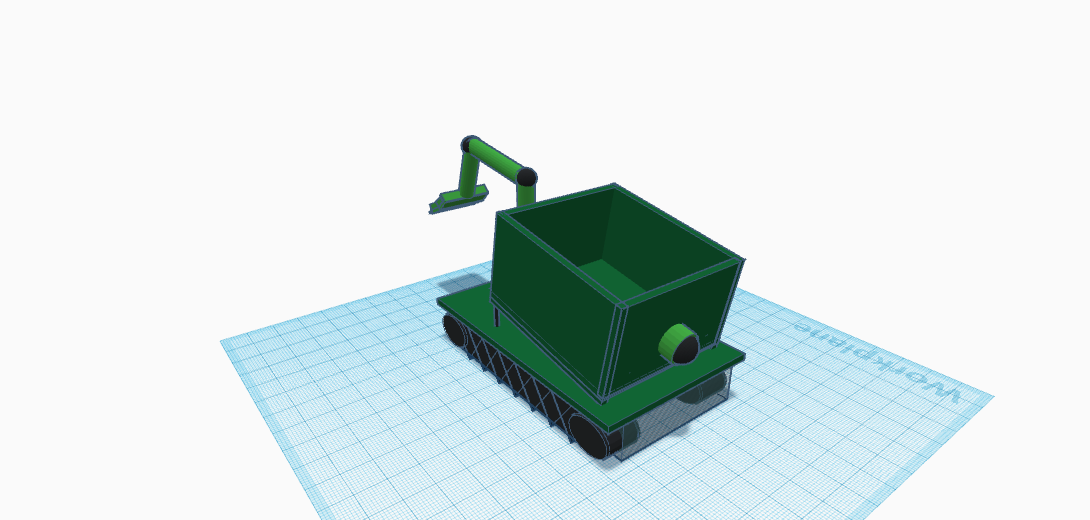
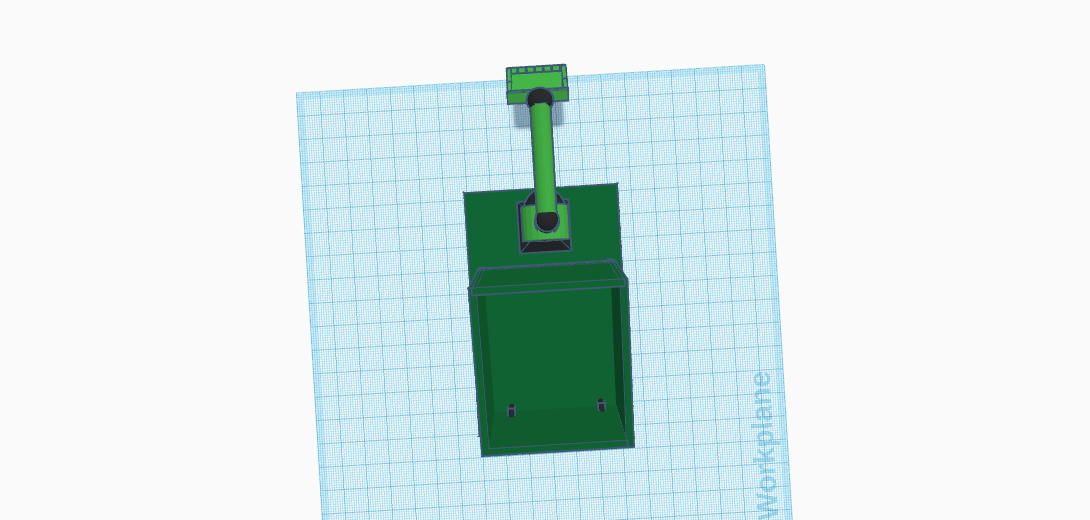
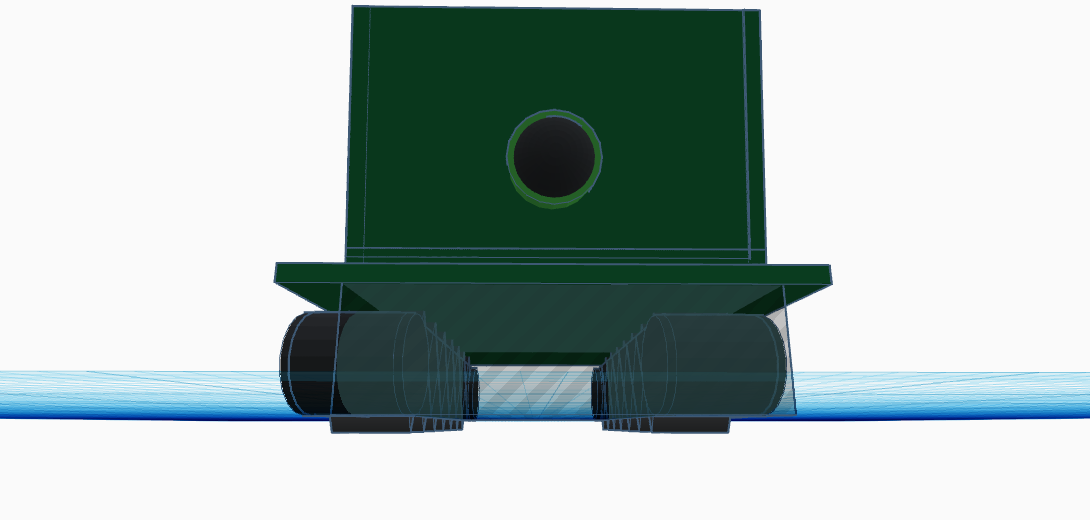
Physical Design: It will be using it’s claw to scoop up dirt and use it’s multiple angle arm to dump it in the trash dumpster behind it, and detect it with its front and back cameras to detect the positioning of the claw and its detection of the track wheels.
Operational Design: It will be able to carry a lot of dirt per trip with most of the tank space being the trash dumpster behind the claw, and being able to dump more out in the buckets per trip with it raising at an angle to push all of the dust outwards into the storage bucket.
Dealing with Dust: Most parts would have either certain materials covering the surface of the dumpster, and some of them being on the inside of the claw, but some around the cameras as well because lunar regolith can easily block the cameras of tracking.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org