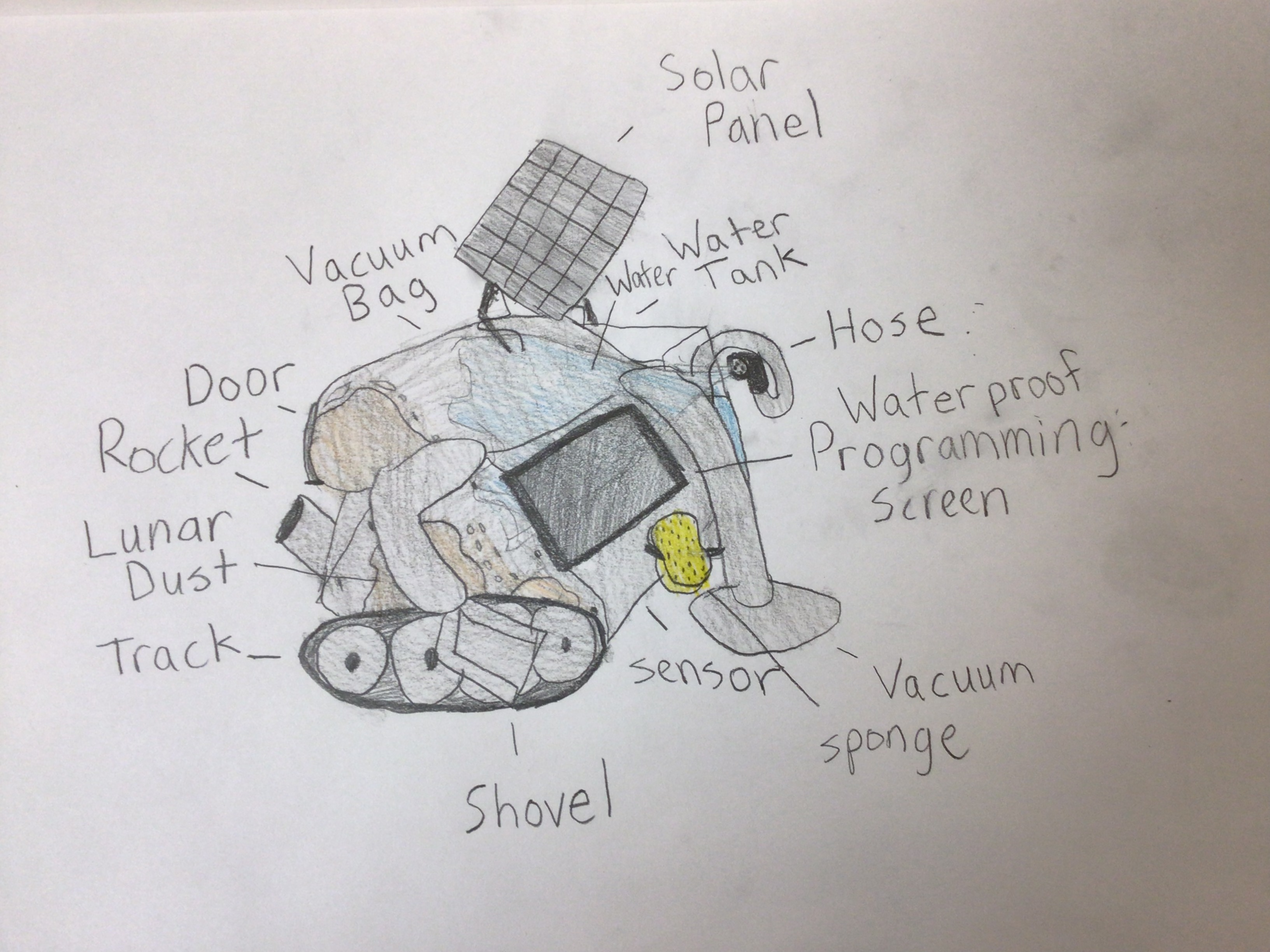
I designed a robot that can shovel and carry lunar soil. First, the robot uses its sensor to find good regolith. Second, the robot backs up once it finds an adequate digging site. Doing that allows the robot to shovel the area it had scanned. Then, the robot shovels up the soil and then drops it back on the ground. Lastly, the robot vacuums all of the shoveled lunar dirt. The robot can carry multiple shovelfuls of soil per trip. Whenever the robot gets dusty, it sprays itself with water and then uses one of its sponge arms to clean itself. In case the robot gets stuck in a crater or on a rock, rockets are attached to the back to help the robot get unstuck. The robot has a battery that powers it. Whenever the battery begins to get low, the robot charges itself using built-in solar panels.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org