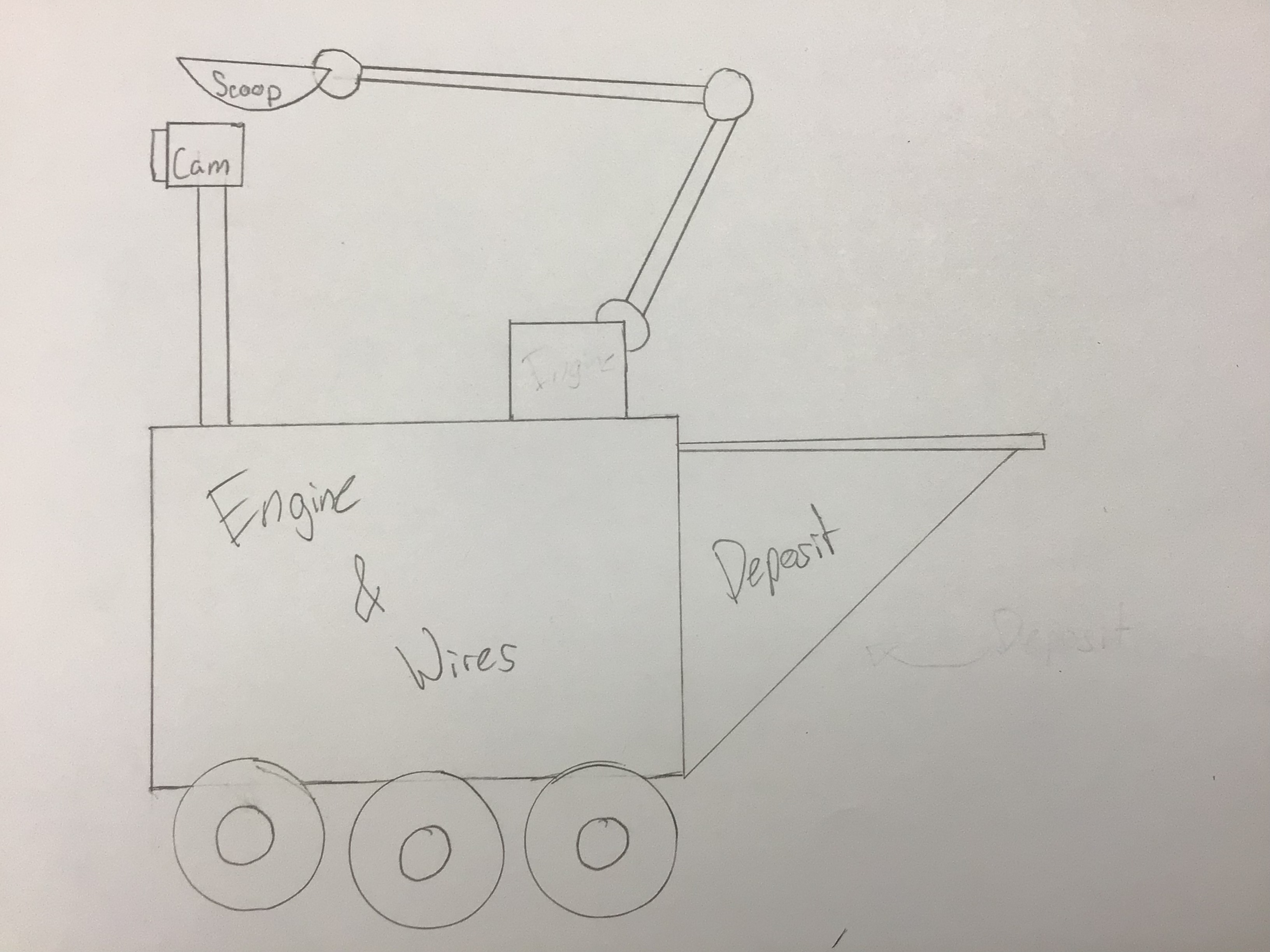
My model is designed for space travel, especially for digging and transporting Lunar soil. With a simple designed robot, the robot is able to carry multiple scoops, transport and dispose of the soil, and quickly get back to work. I chose to use wheels and not tracks since rocks and dust could get stuck in the track gears, and I chose three wheels and not two since the dust could be kicked up with the least amount of wheels.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org