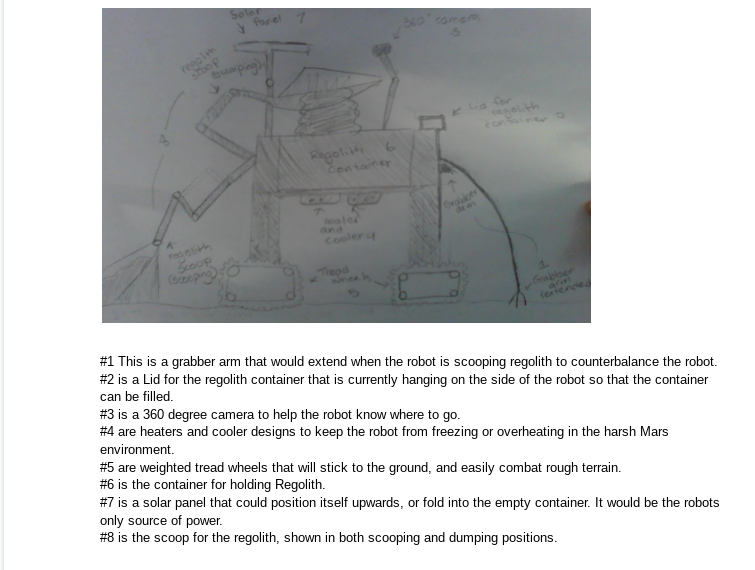
This lunar rover is made out of aluminum alloy and titanium. It is solar-powered, and has a solar panel arm that could fold down during transport. It is controlled by people on earth or mars that would give the robot coordinates to go to where it would dig. It would then use its 360-degree camera to navigate around craters and large rocks to get to these coordinates. After it was done scooping it would return to its starting place. It would then repeat this process until the people told it to stop. People could watch the camera, and manually control it if needed. It would carry a moderate amount of regolith. To combat regolith, the entire rover would be covered in a thin mesh of weak magnets held away from the rover so that any regolith trying to stick to the rover would stick to the mesh instead.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org