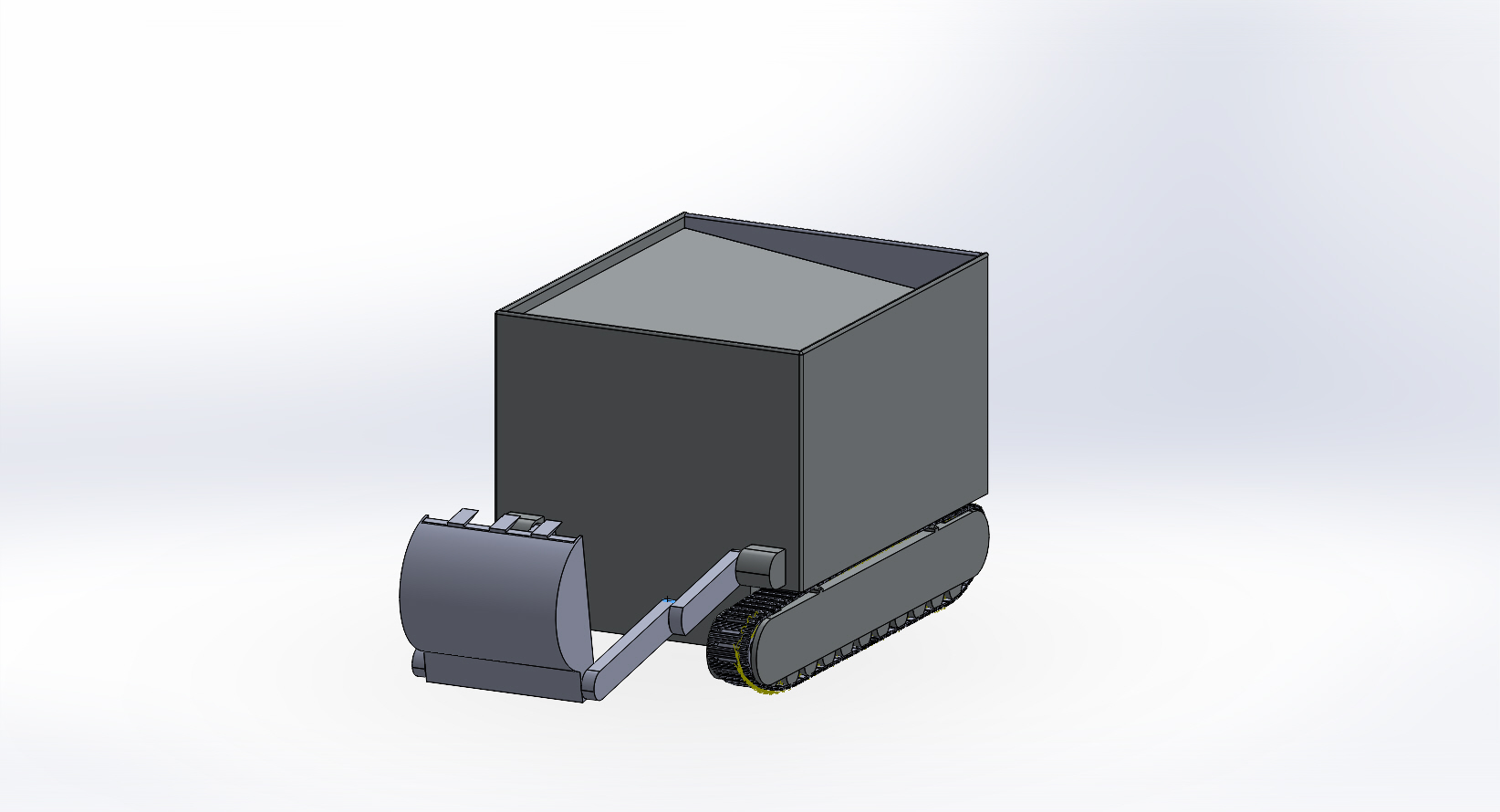
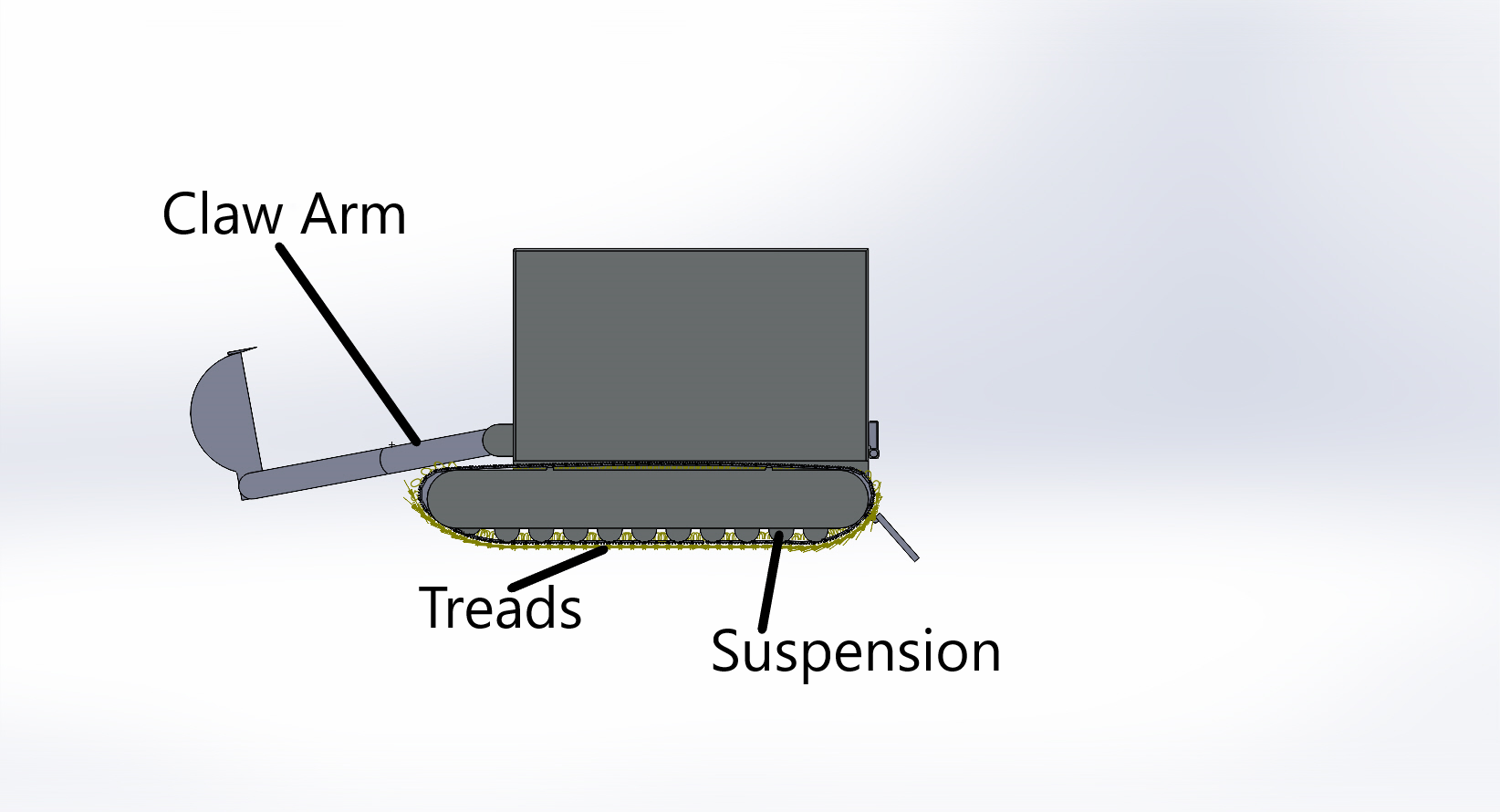
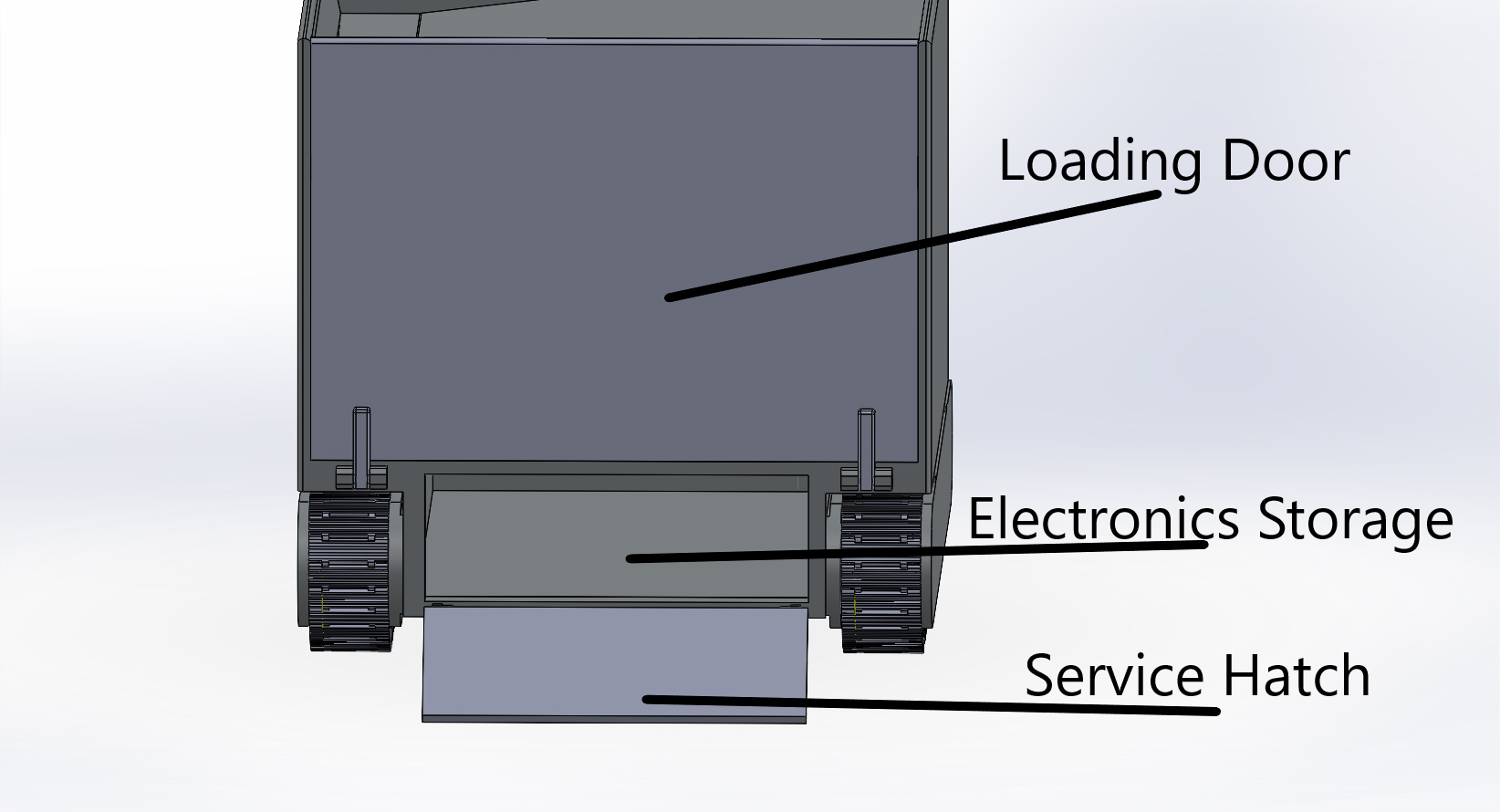
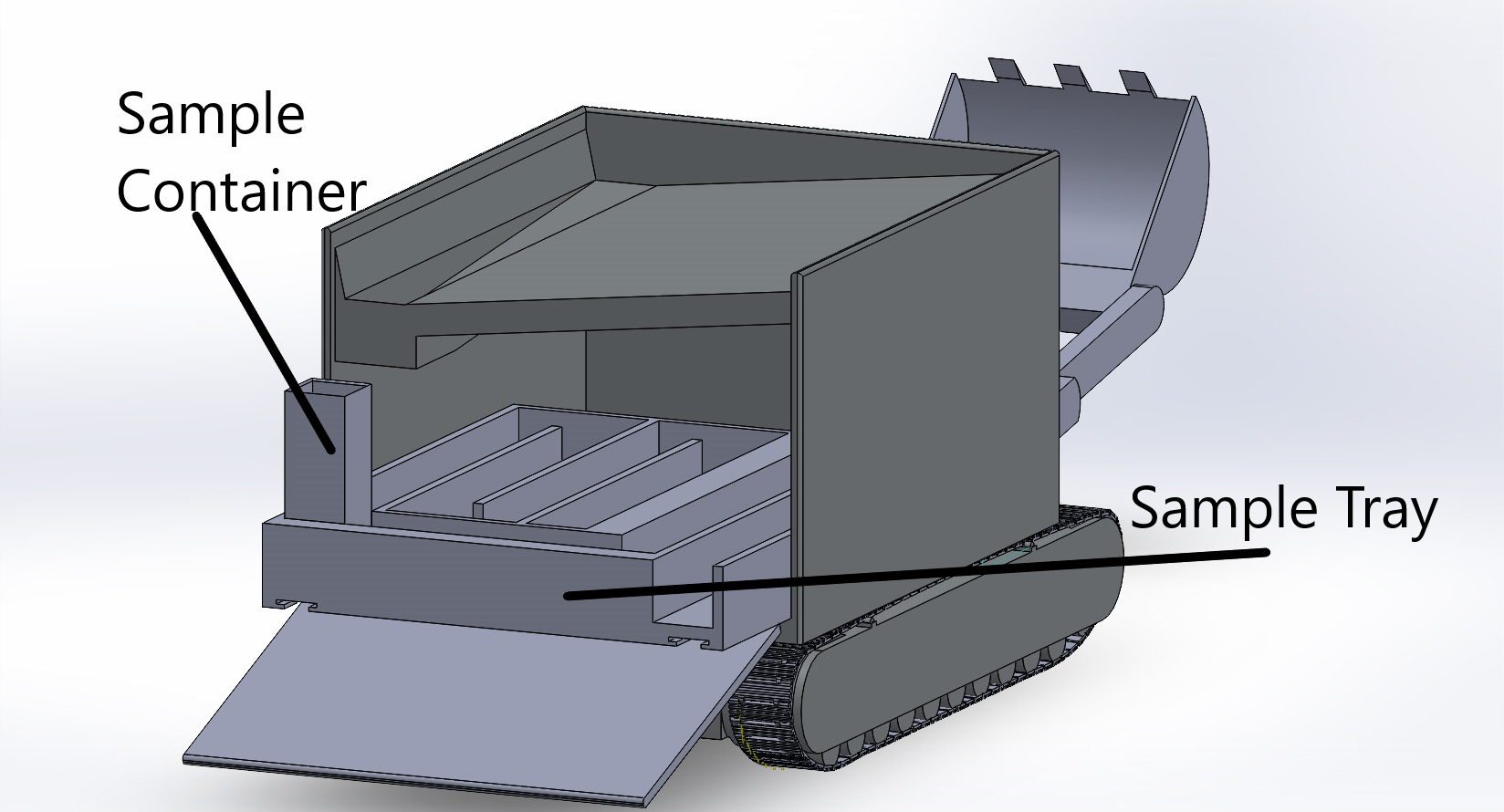
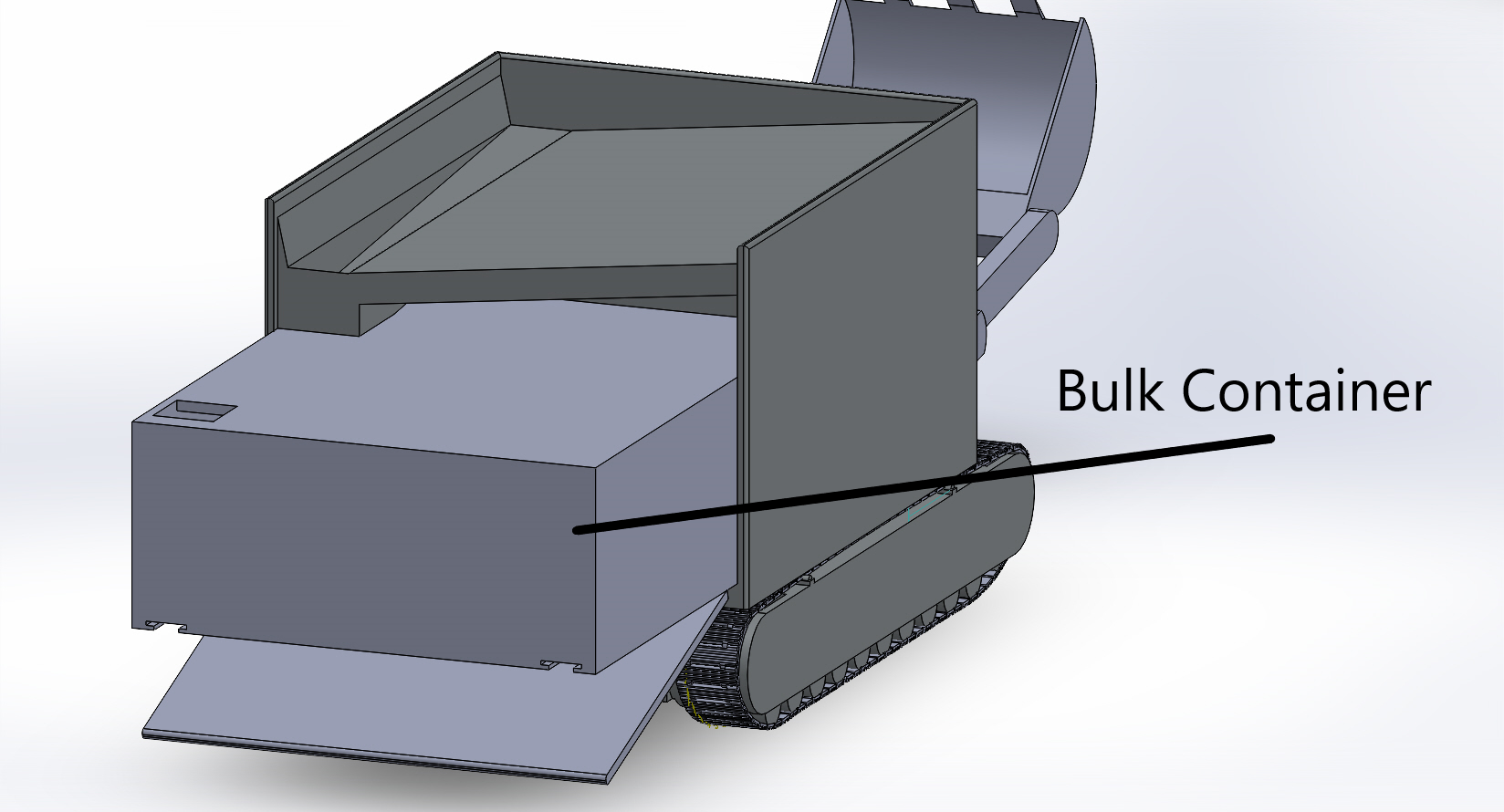
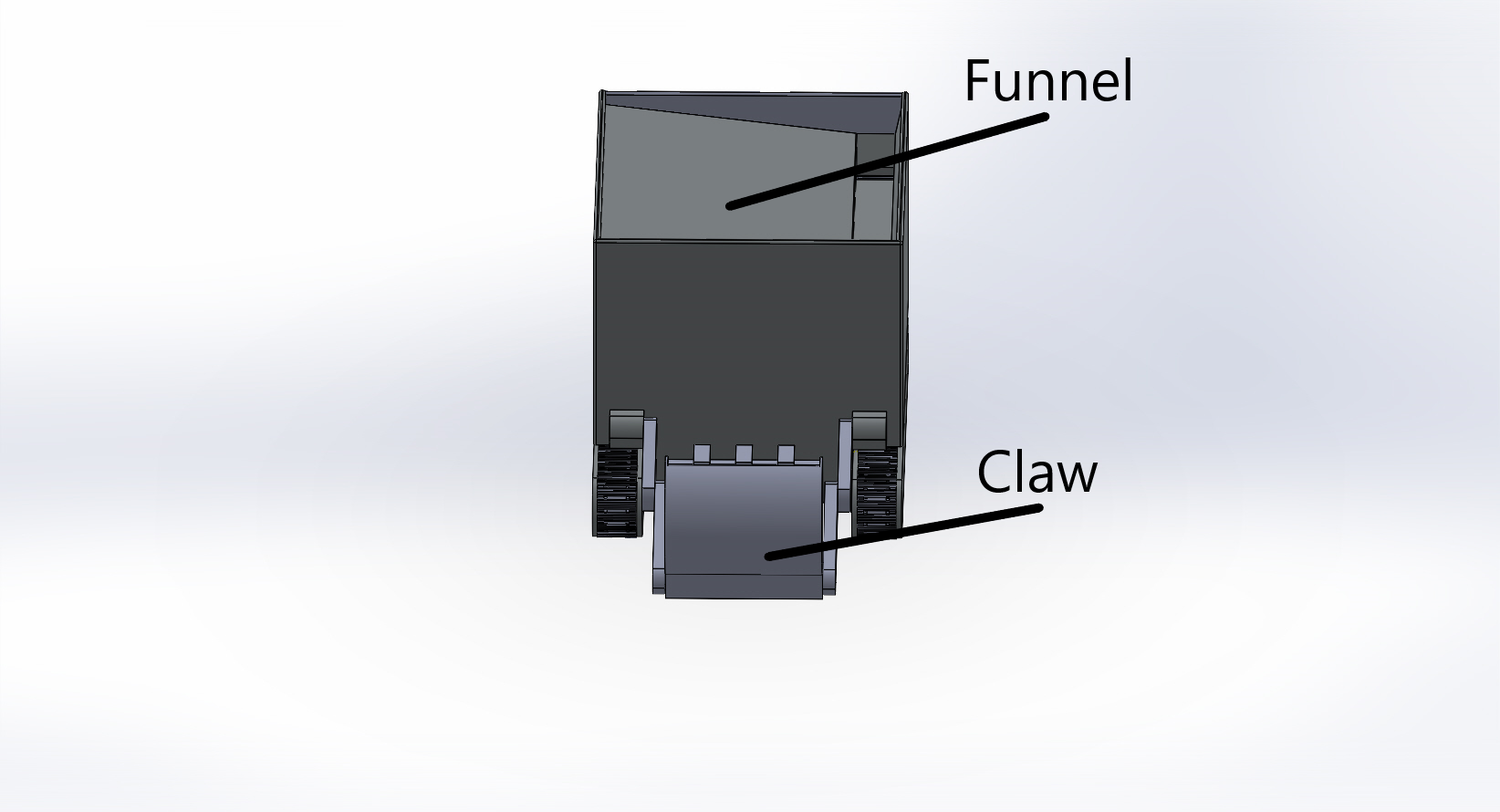
My design for this robot involves an excavator claw with a three jointed arm to collect regolith and dump into the collector. The collector is a funnel into a container for storage. There are two storage types possible for this robot: a bulk container and a sample container that are interchangeable. The bulk container allows you to collect up to 50 pounds of lunar regolith in one trip. The sample container involves a motorized tray and sample containers. The tray can connect to the robot and move sample containers underneath the funnel to be filled up. Once a container is filled up, the tray moves the next container underneath the funnel. The mode of transportation my design uses is caterpillar tank treads as they provide much more traction in the lunar environment compared to wheels. The electrical components would be put in the area beneath storage.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org