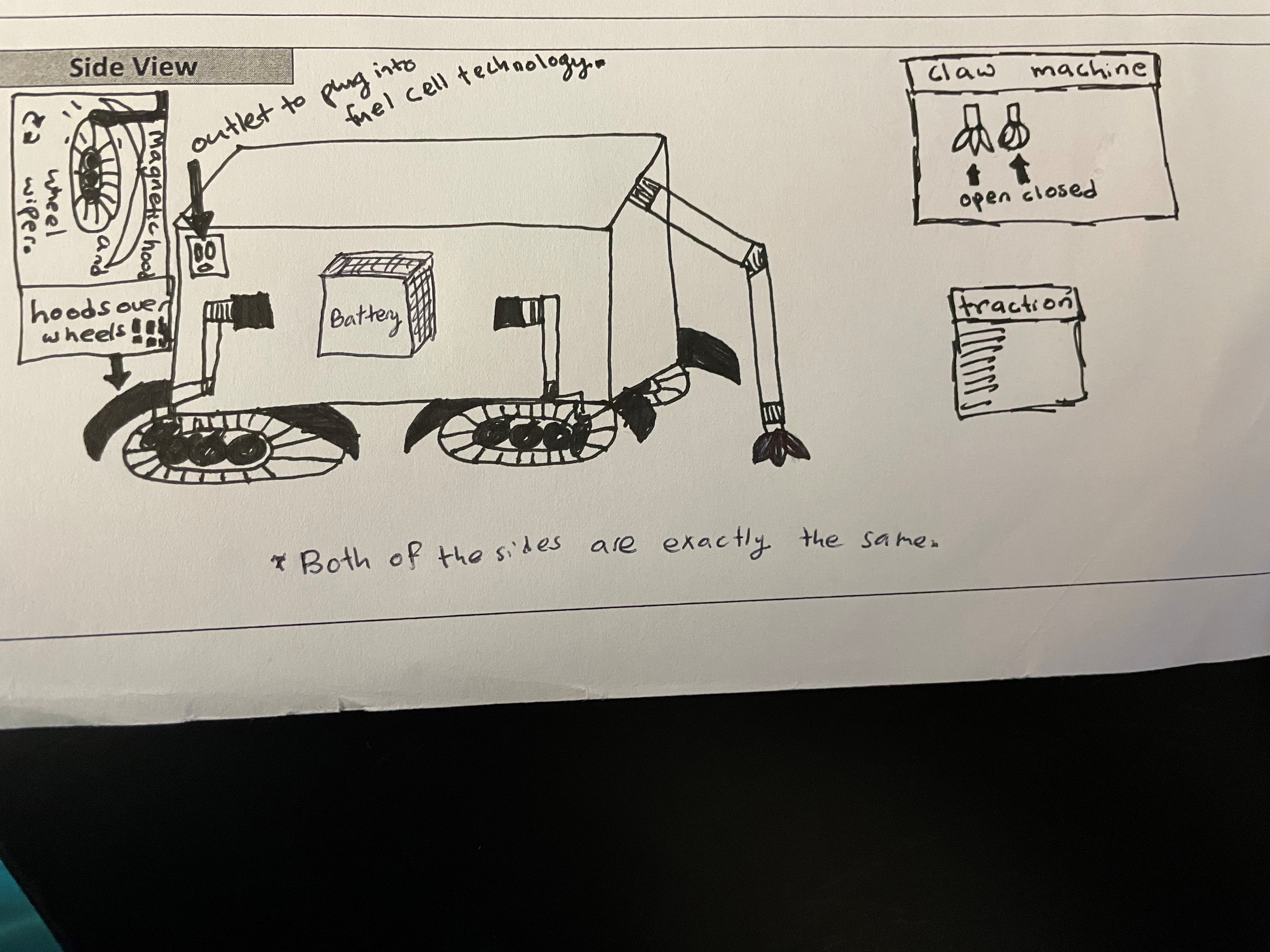
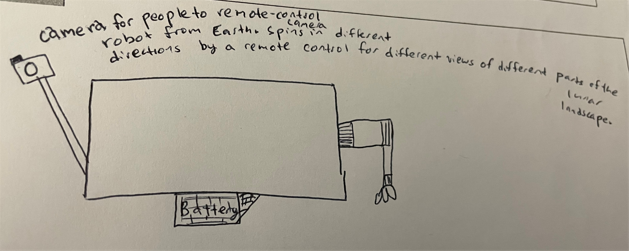
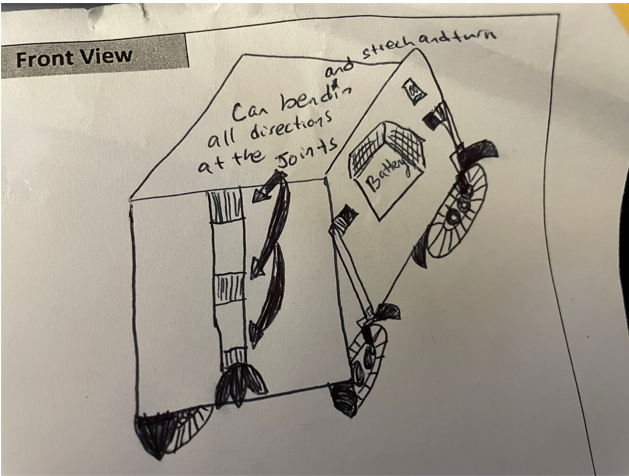
The robot’s movement will be remote-controlled, and claw will be autonomous; to be the most efficient because the transportation won’t have to be pre-programmed to avoid obstacles. Once the robot arrives in the correct location the robot will scoop in lots of small digs. This robot will have tracks with thick traction, to grip the ground well. These materials were chosen to withstand extreme temperatures; Aramid, rubber, and Titanium Aloid. Because the robot will not be tall, and it will use light materials, it will maintain balance and it will also be more stable with the mass of the regolith. Hoods and magnetic wipers over the wheels will control the small amount of dust that gets kicked up by the robot’s slow transportation. It will be powered by hydrogen fuel cell technology, hydropower turbines, and solar panels so that the robot be making use of resources in an efficient way.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org