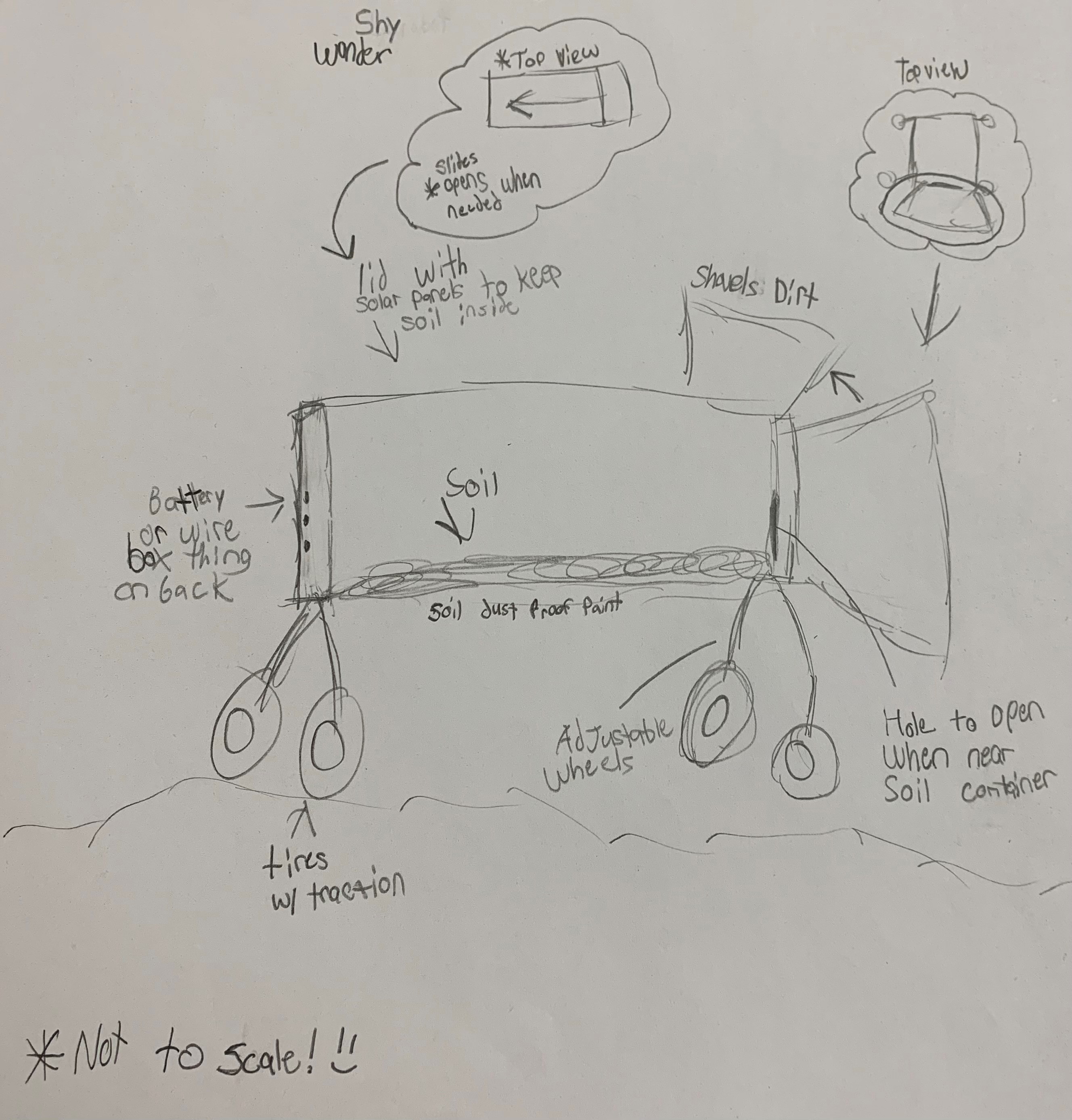
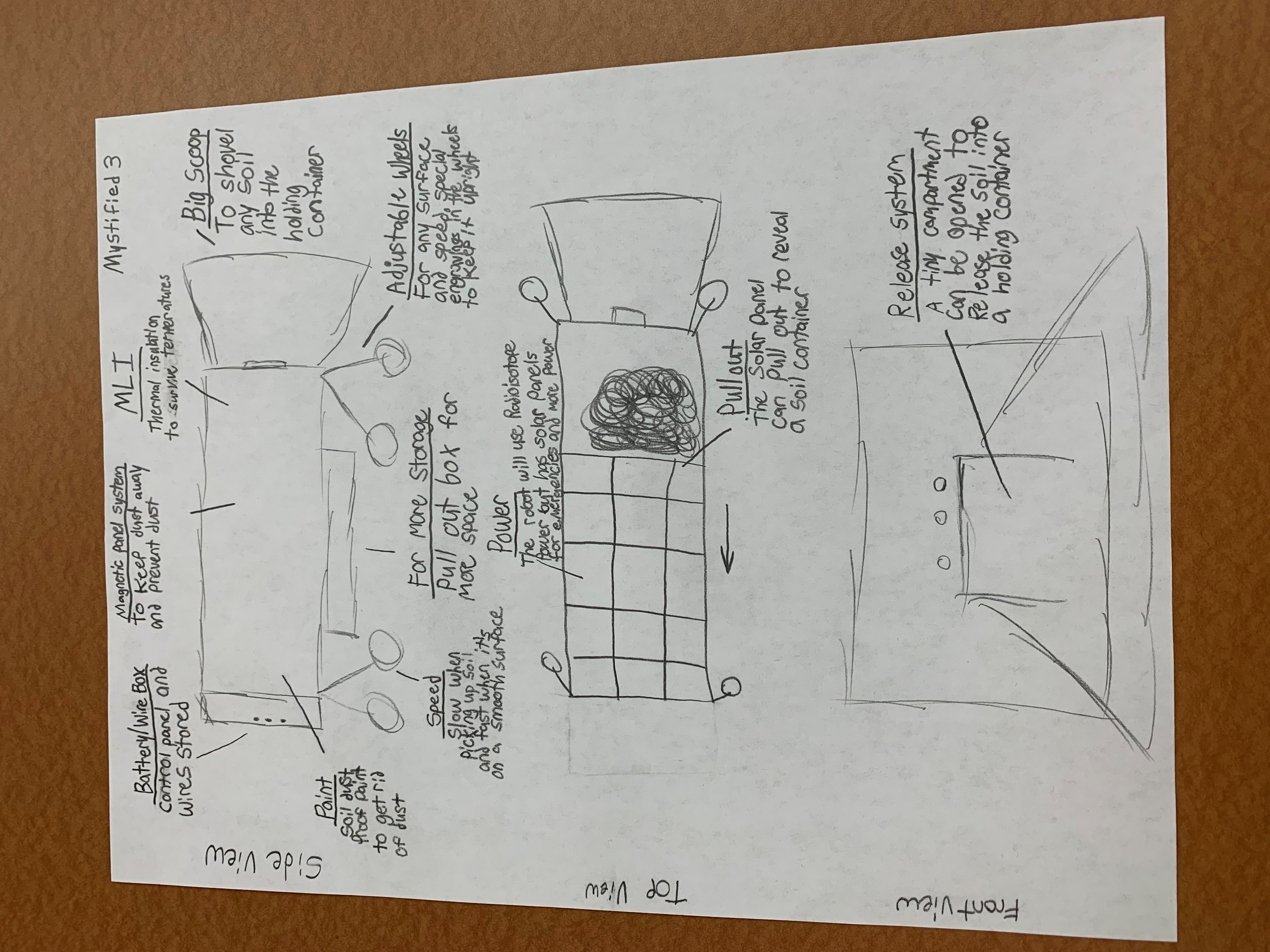
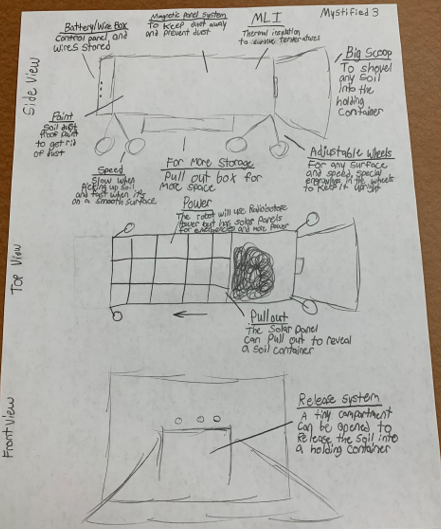
My robot will be operated autonomous, but it can be controlled by the astronauts on the moon. It will be powered by radioisotope power for reliable power but has solar panels for emergency/more power. The wheels have special engravings for traction and keeping the robot upright. They will also be flexible & adjustable. It travels at varying speeds; slow when collecting regolith, fast when it’s on a smooth surface. To handle temperatures, multi-layer insulation will cover the robot. To deal with dust, the robot will have a passive dust technology that is a special paint made by NASA, and an active dust technology that are magnetic panels. The robot will have a large scoop in the front to excavate/collect soil. After it’s done, the soil will be put in a large trough in the back. When it arrives at the holding container, a small hole behind the scoop will open.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org