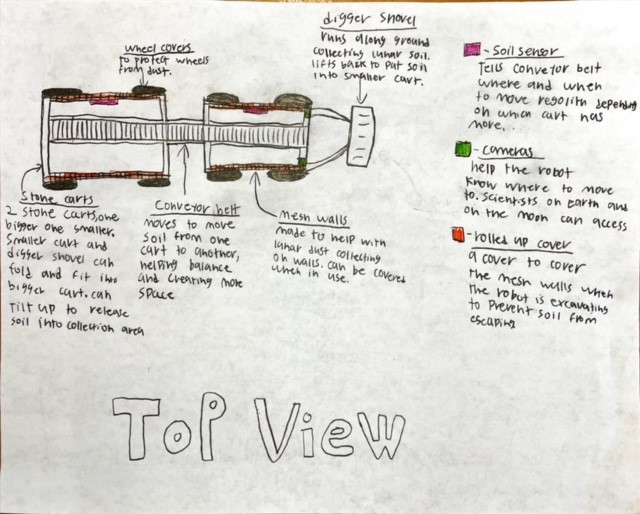
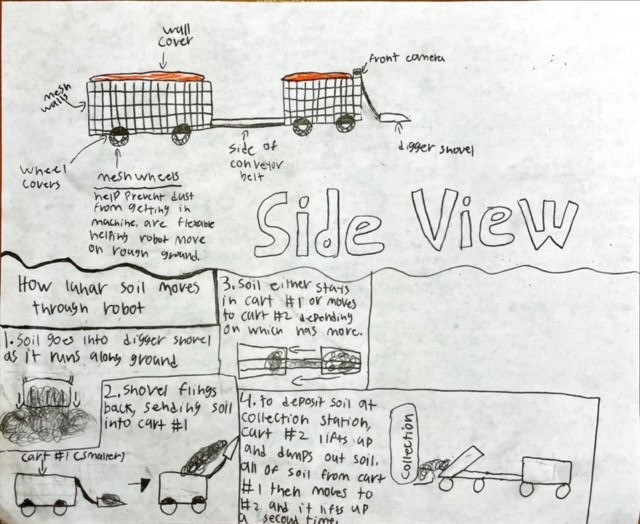
The robot will work autonomously, using a grid and taking pictures to find the best route. There will be a person on earth who can control it during emergencies. The power system is using batteries that can be charged at charging stations using solar panels. It will maintain balance by having four wheels on each side of the carts and staying low to the ground. There will be a sensor on each cart to tell TH-2 where soil must be distributed to maintain balance. It will have varying speeds; slow when digging, fast when empty. It will have mesh wire wheels for traction and to limit dust. TH-2 will handle temperatures by using stone as a base. It will handle dust with a passive technology of having coverable mesh walls. The robot will dig with a scooper arm and deposit soil into the first of two carts.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org