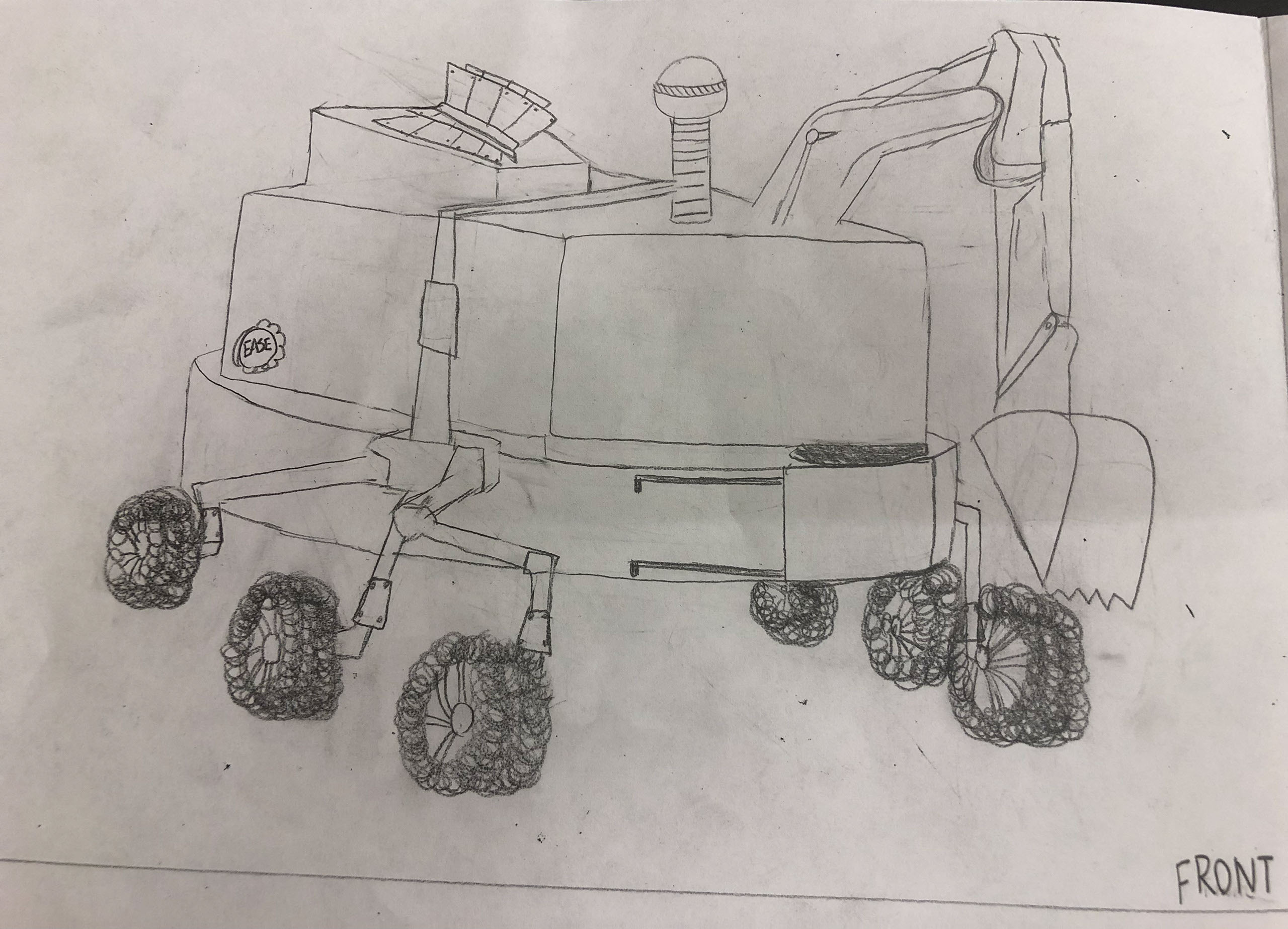
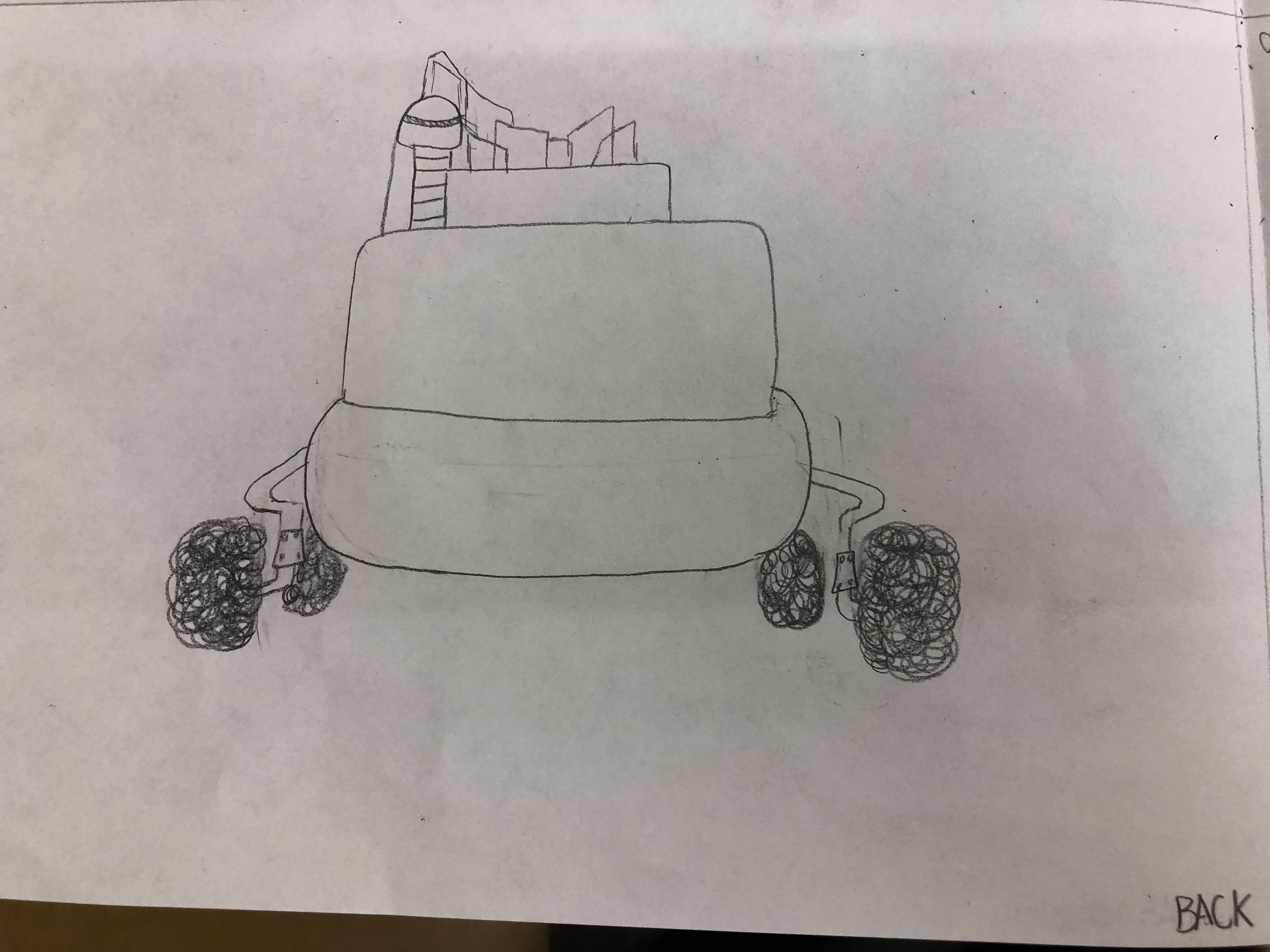
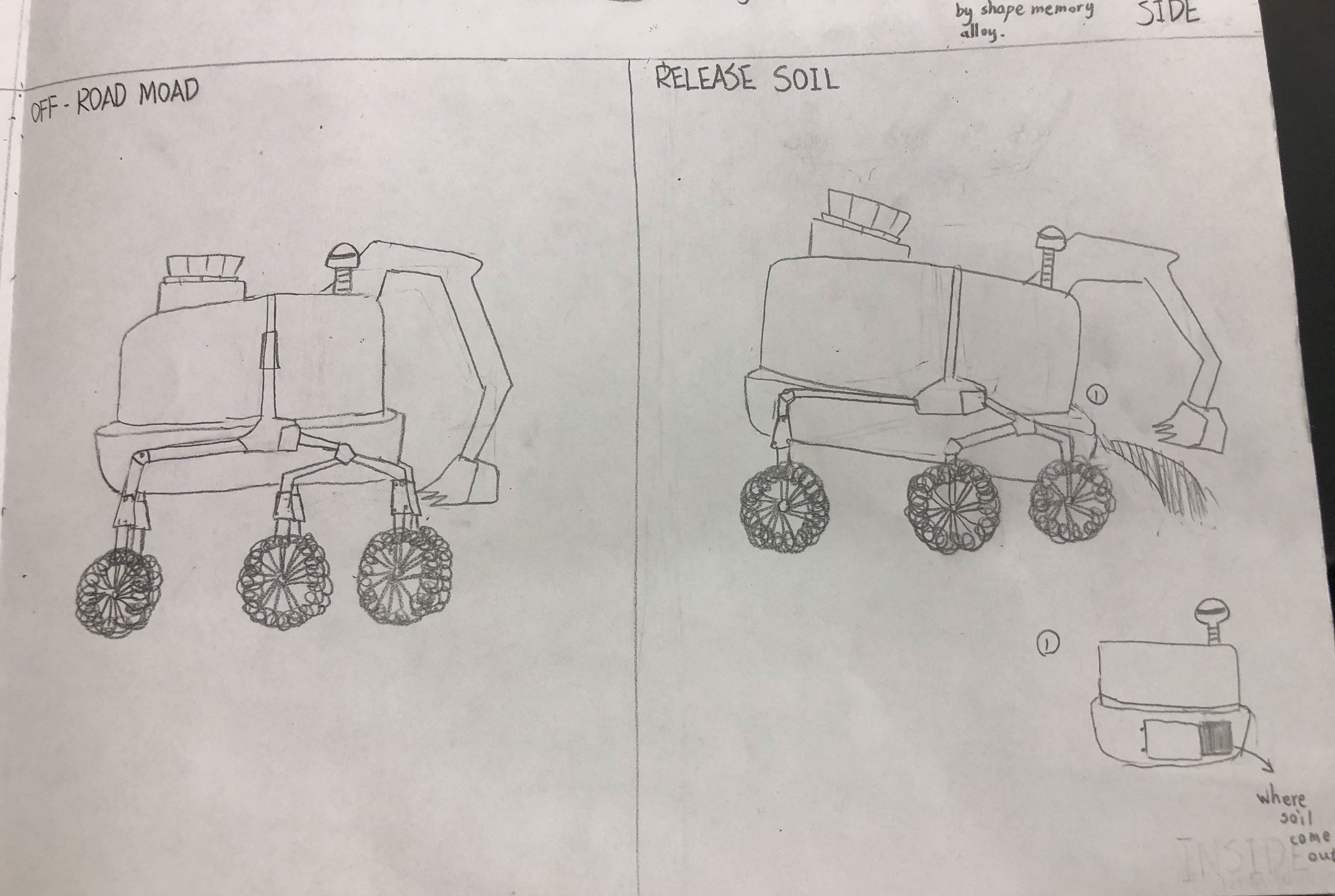
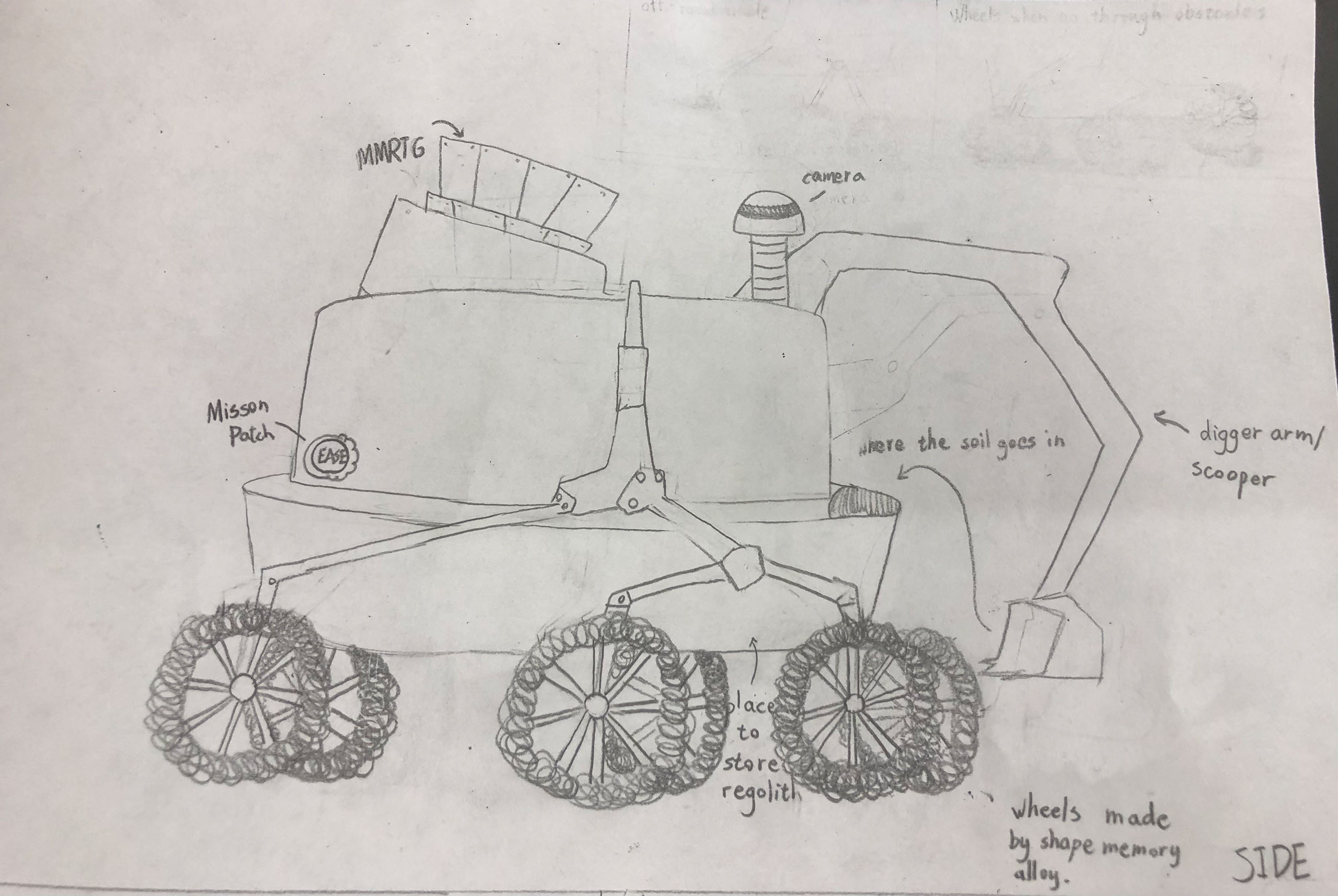
Luna uses the excavator arm to dig out the soil and pour it into the storage space. The rear wheel pushes up to tilt the space and let the soil flow out of the opening, thereby releasing the soil. It has 6 interconnected wheels spread out, with high flexibility, Luna can maintain balance when traversing obstacles. The shape memory alloy wheels change shape when encountering obstacles without getting damaged. The speed of Luna depends on the level of dust on the surface. When passing through dusty areas, it slows down and enters off-road mode (wheels are pushed up). MMRTG is the power system of this robot. Luna is based on nickel-titanium alloy to cope with extreme temperatures. By connecting MMRTG with pipes, it helps Luna to keep warm inside. Luna will be controlled by an astronaut when it detects a huge obstacle, so the astronaut decides which way is best.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org