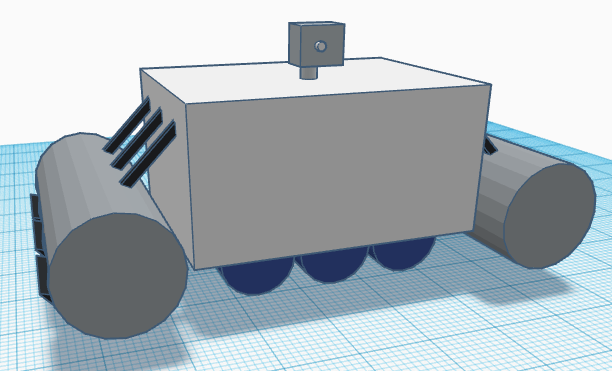
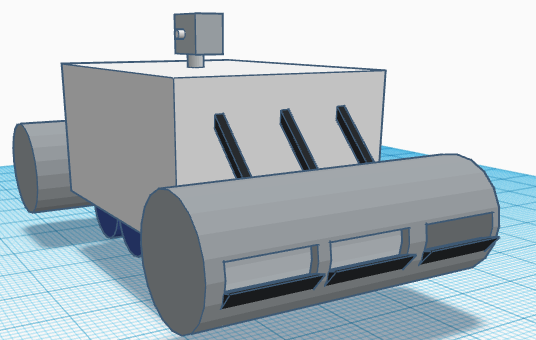
The robot will use rotating cylinders that have scoops attached. To pick up and to store the regolith it will close the scoops. The rover body will consist of mostly a titanium alloy with a gold foil layer to protect from UV light and x-rays. A tubing will be passed through all parts of the robot with temperature controlling fluid. To keep regolith from sticking, we will try to keep as few parts sticking out as possible and clean the robot upon docking the moon base. A titanium mesh wheel with will be used so the wheels will receive minimal damage. It will be balanced due to it being mostly symmetrical. It will get its power from a fuel cell that gets water from the moon's regolith and will use a powerful electromagnetic motor to move. The driving will consist of all AI to nearly automate the collection of regolith.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org