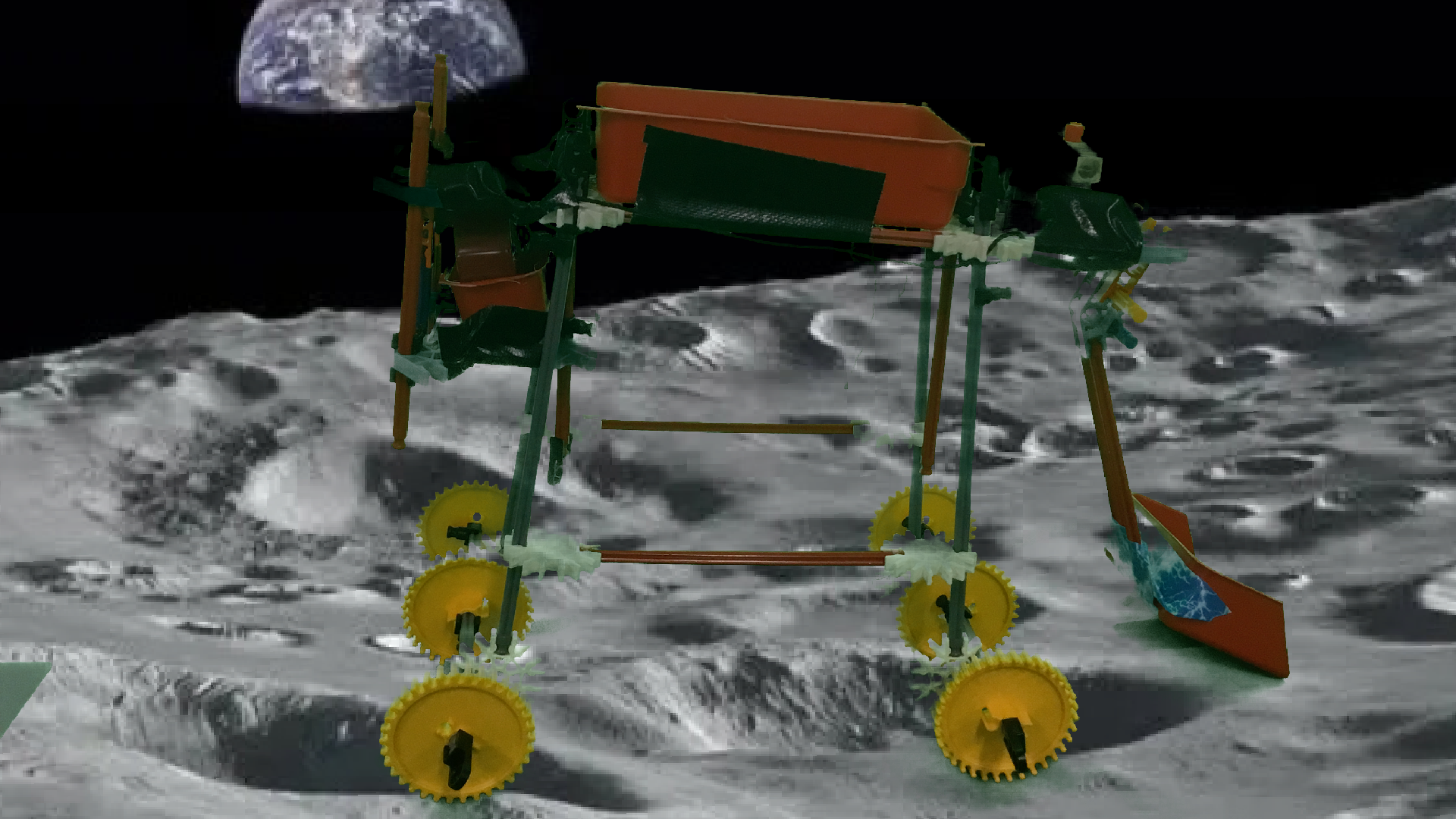
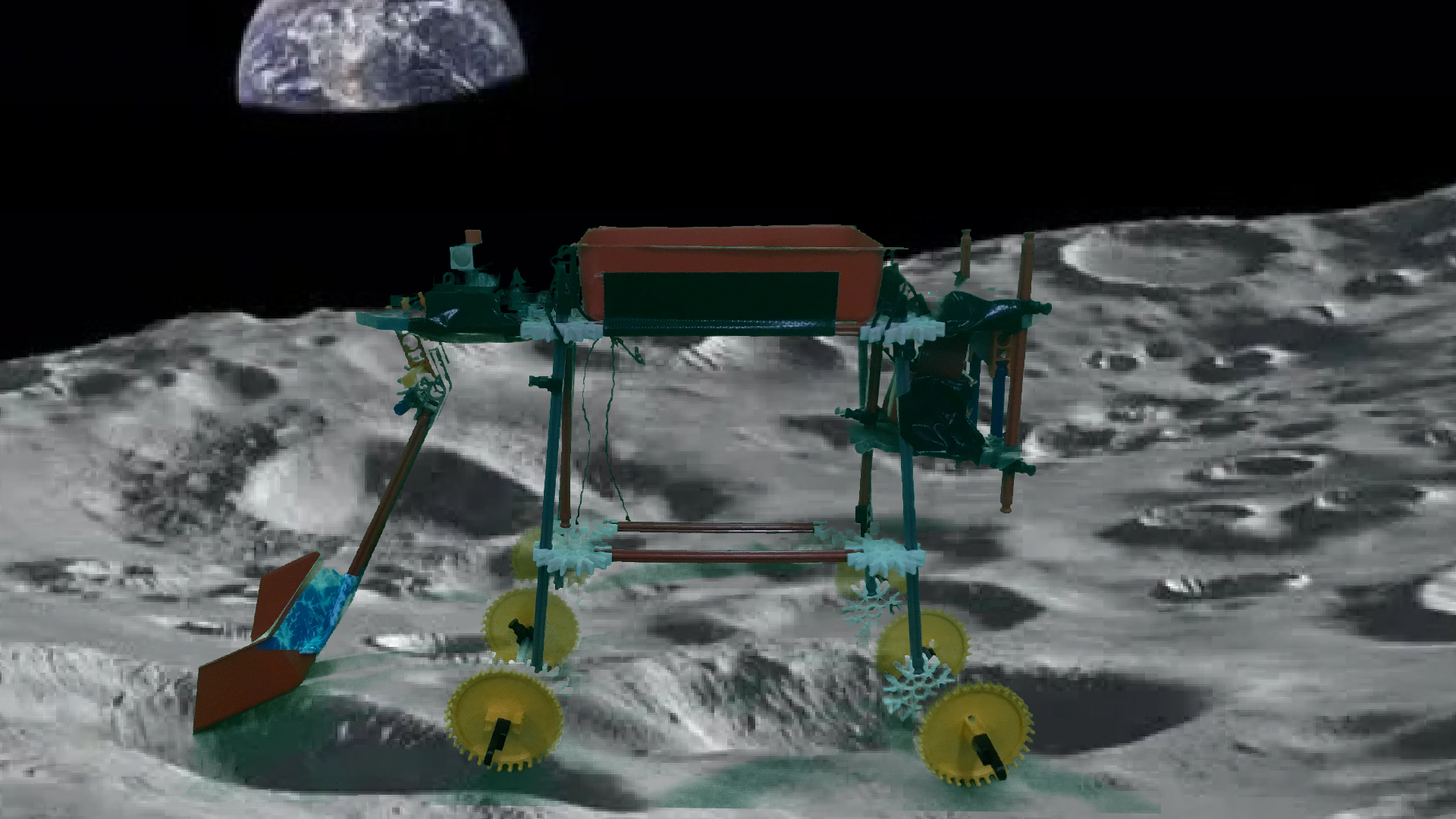
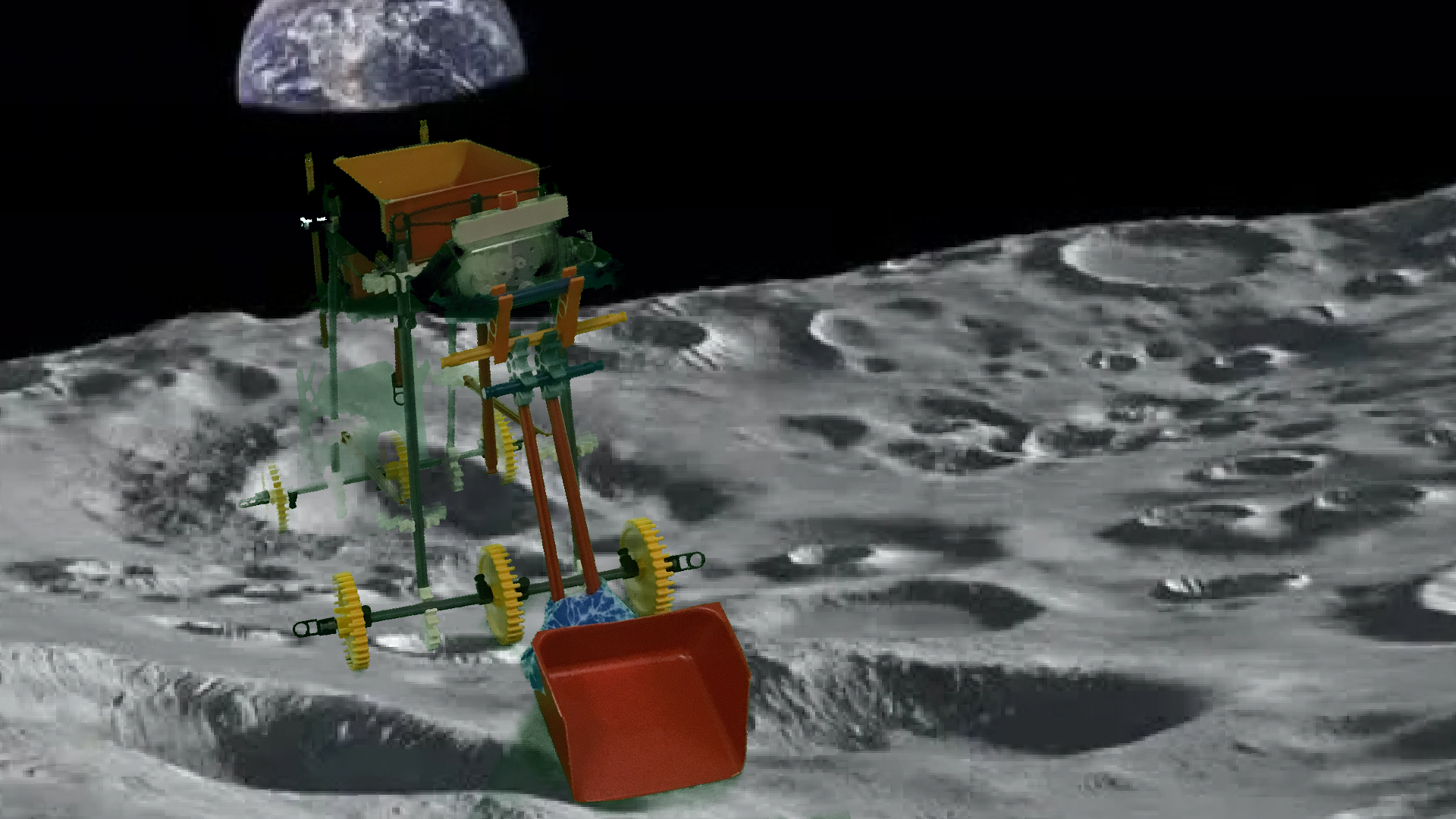
My design has six wheels, it has a larger size connect on the back side of my robot. There are two support beams in the middle of the two connects that are holding the wheels and the body of the robot together. The bucket that holds the regolith is in the highest place possible, and the most stable part of the robot the digger has a little bit more complicated design. On the bottom of those two long connectors are for the digger. The back has a voice command box that allows you to give directions to the robot. The is the full design of my robot.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org