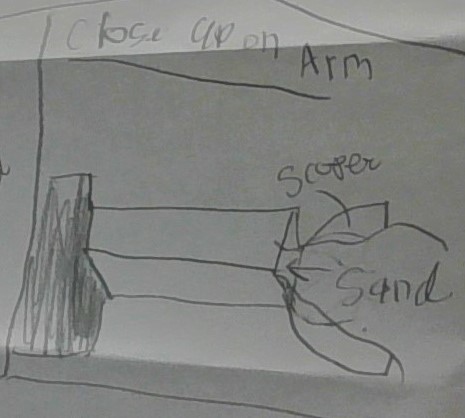
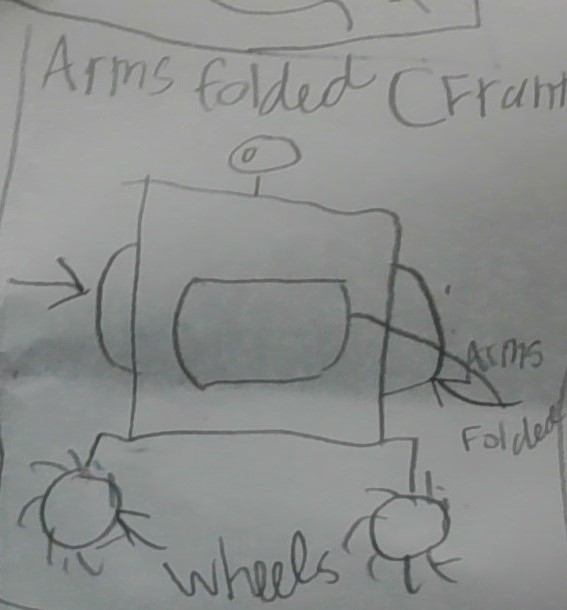
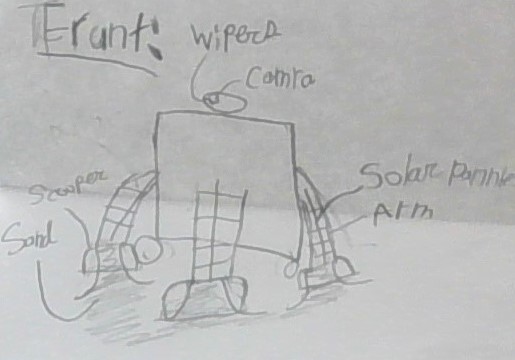
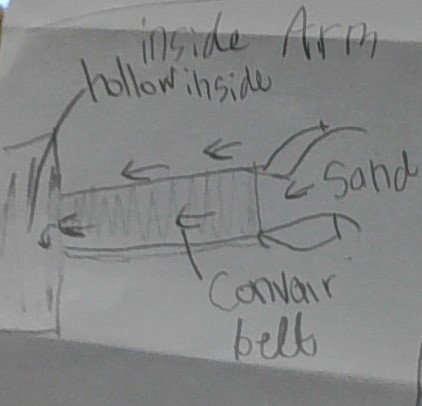
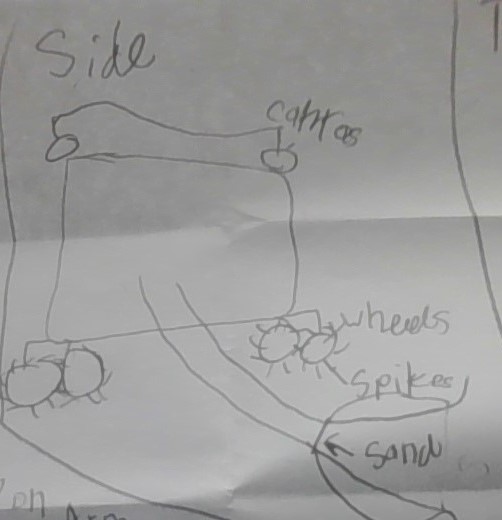
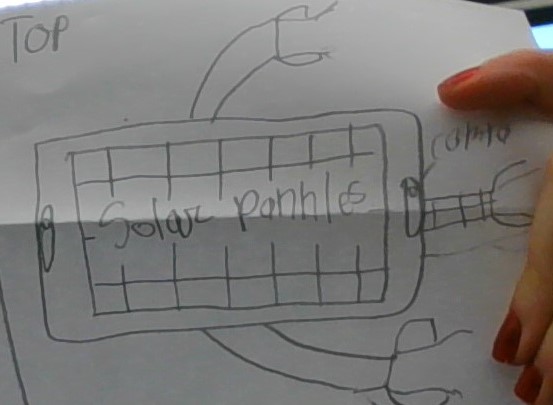
Description The Robot can be programmed to find a convent path in a set location. A VR headset will be used to see, and engineers can control where it looks. The camera will have wipers for dust. It has three big scoopers. The scoopers collect lunar soil and push it onto a conveyor belt inside the sleeve. The soil travels to the hollow middle of the robot. The tops of the sleeves and the base of the robot will be lined with solar panels. It will go at a medium speed. The arms (sleeves and scoopers) will have the ability to fold up for more convent travel. It will have a WEB heating box for the electrical system, a gold coating, and most parts will be made of aluminum. It will have a wide base and spikes on it’s wheels for traction. The wheels will be far apart for stability.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org