Lunabotics Jr
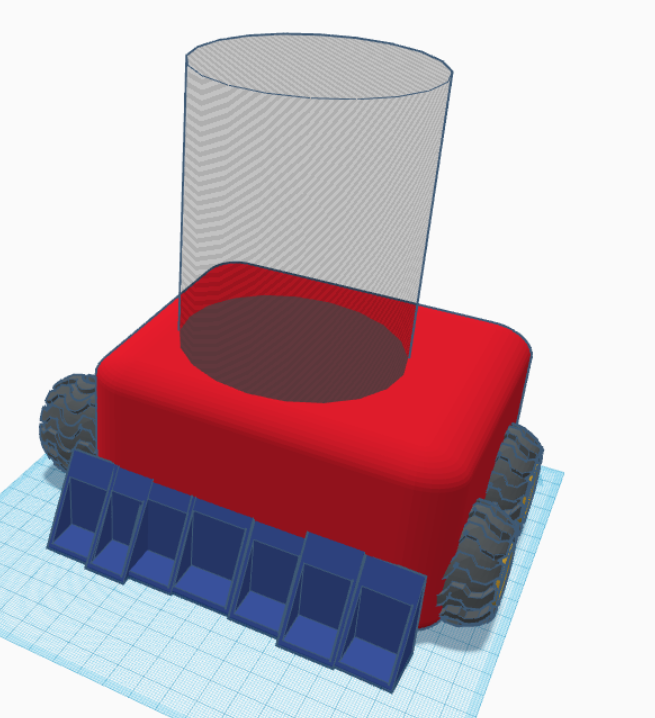
Physical Design: How will your robot scope/dig and regale My robot will pick up the stuff with the scoopers that will easily pick it up.
Operational Design: How will my robot carry lots of dirt per trip. My robot will catch a lot of dirt per trip because it has suction cups so it can carry more dirt.
Dealing Design: (dealing with dust)
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org