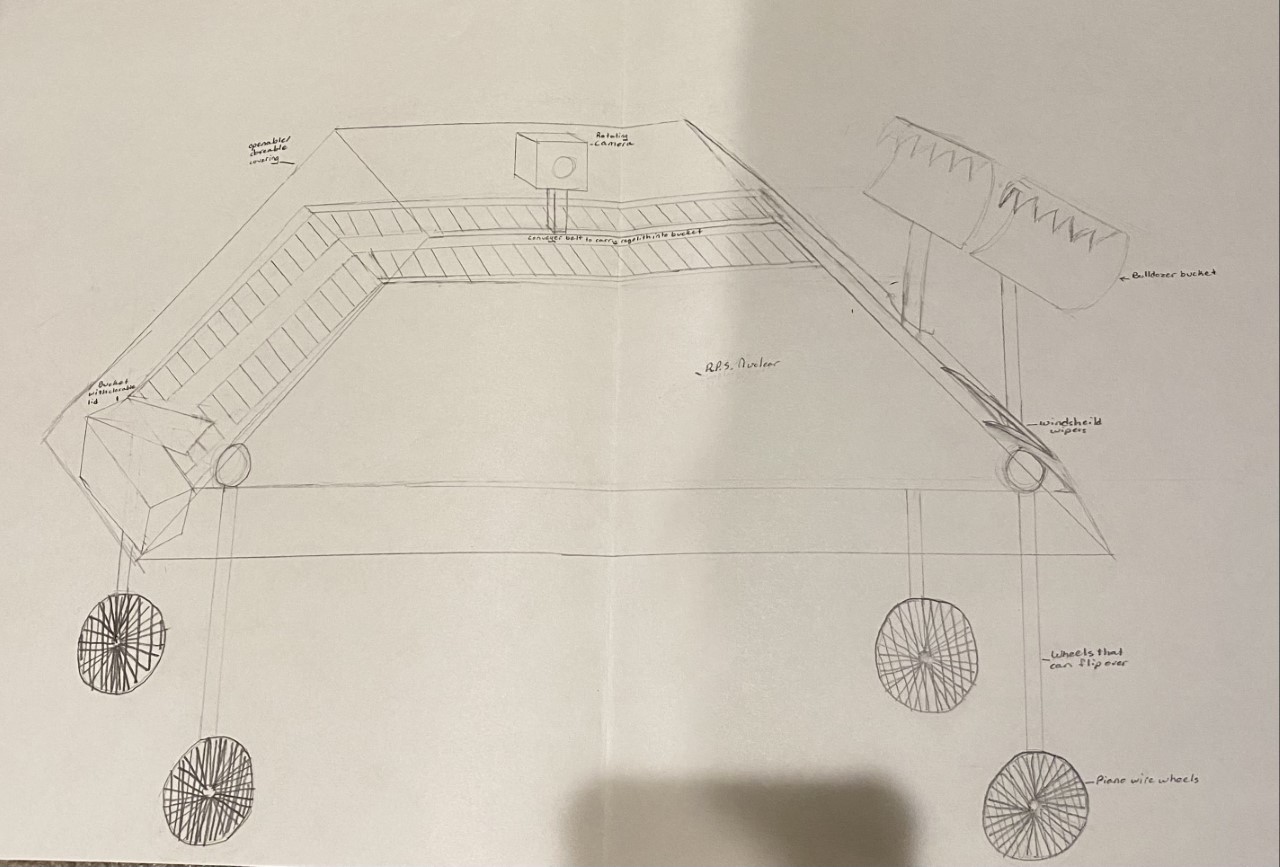
My lunar robot is remote controlled. To pick up regolith I would have a bulldozer like design and a Convery belt for a dust free entrée into a bucket with a closable lid. To keep from dust entering into the mechanics, I would have an openable/closable covering over the robot with a windshield wiper to wipe off any extra dust particles settling on the covering. For a power source, I would use a nuclear power because of its reliability. To keep balance, my robot would go at a slow speed and would have a wide body build. In case of a flip over, the wheels would be able to rotate to flip the robot back over. I would have piano wire wheels for the best traction. My robot will be multilayered with aluminum (prevents from getting too cold) and carbon carbon (prevents from overheating).
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org