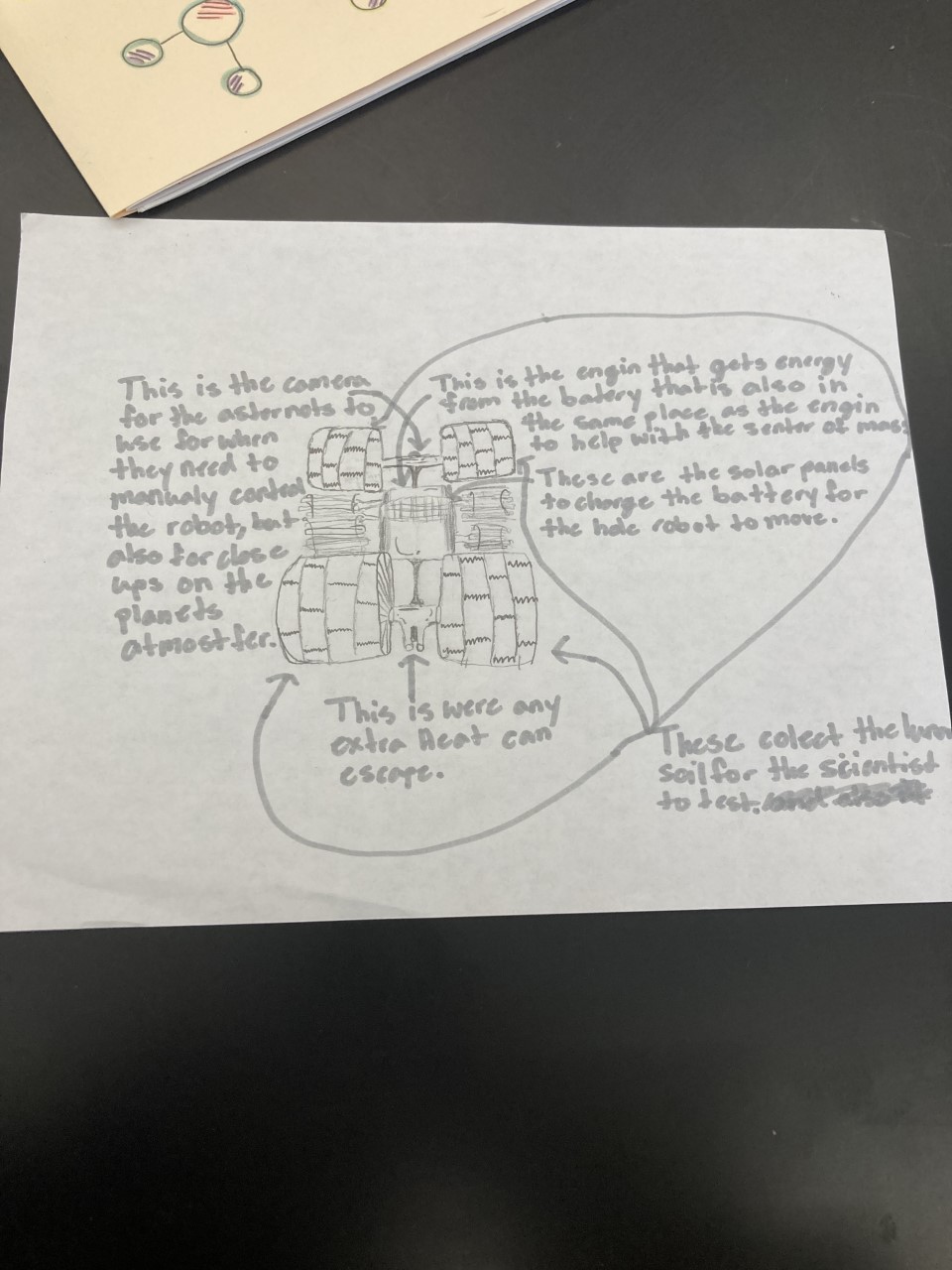
Jarvis (my robot) will be able to be controlled autonomously also be able to be controlled remotely. Jarvis’s main power source will be its battery that will get it charge from solar panels. Jarvis has a low center of mass so it will not tip over. The robot will notice when the amount of dirt decreases so it will slow down giving the wheels a little longer to dig into the moons surface therefor making collecting lunar soil more effective. Jarvis has wheels that have multiple functions, one is it will store the soil, grab onto the moos surface while also collecting the soil. Jarvis is made up of mostly titanium which is made to sustain extreme tempters. When the root notices to much dust is coming up the robot will adjust its speed. The robot’s wheels have ridges in them making it able to grab the soils.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org