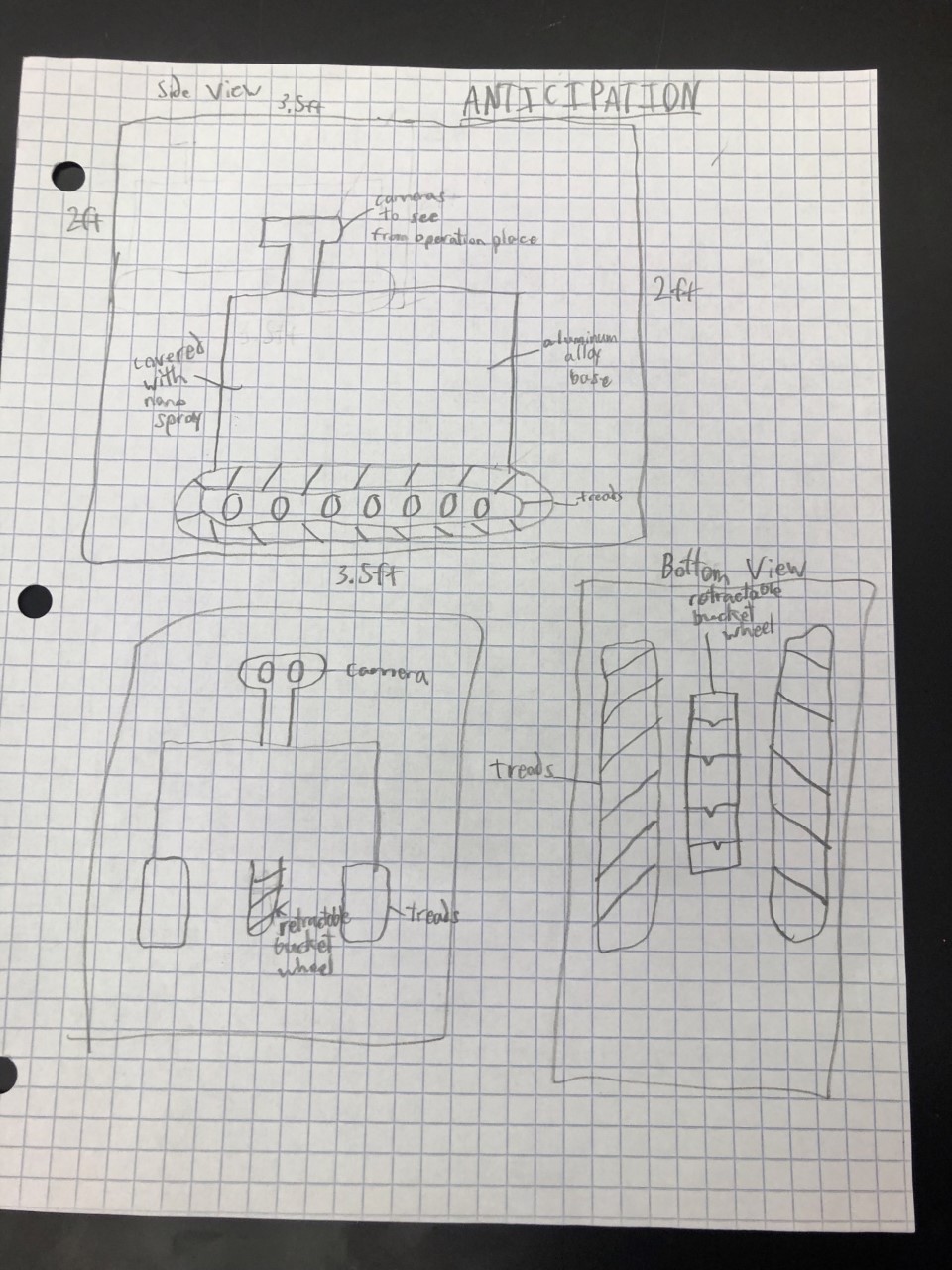
The model will be primarily aluminum alloy, partnered with a bucket wheel for a consistent flow of dust. The bucket wheel will be placed in between the robot’s treads, which will provide good traction and good control. Average speed between 8-16 kilometers per hour will suffice and should fluctuate speeds depending on the terrain. Supposedly, the rover will be covered in a carbon nanotube coating, which will repel dust. The rover will be rechargeable at a charging station (which will use radioisotope power) where it will be able to dock and rest. To control it, people from Earth or the I.S.S. can use it remotely, but if needed, it can be used from the moon.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org