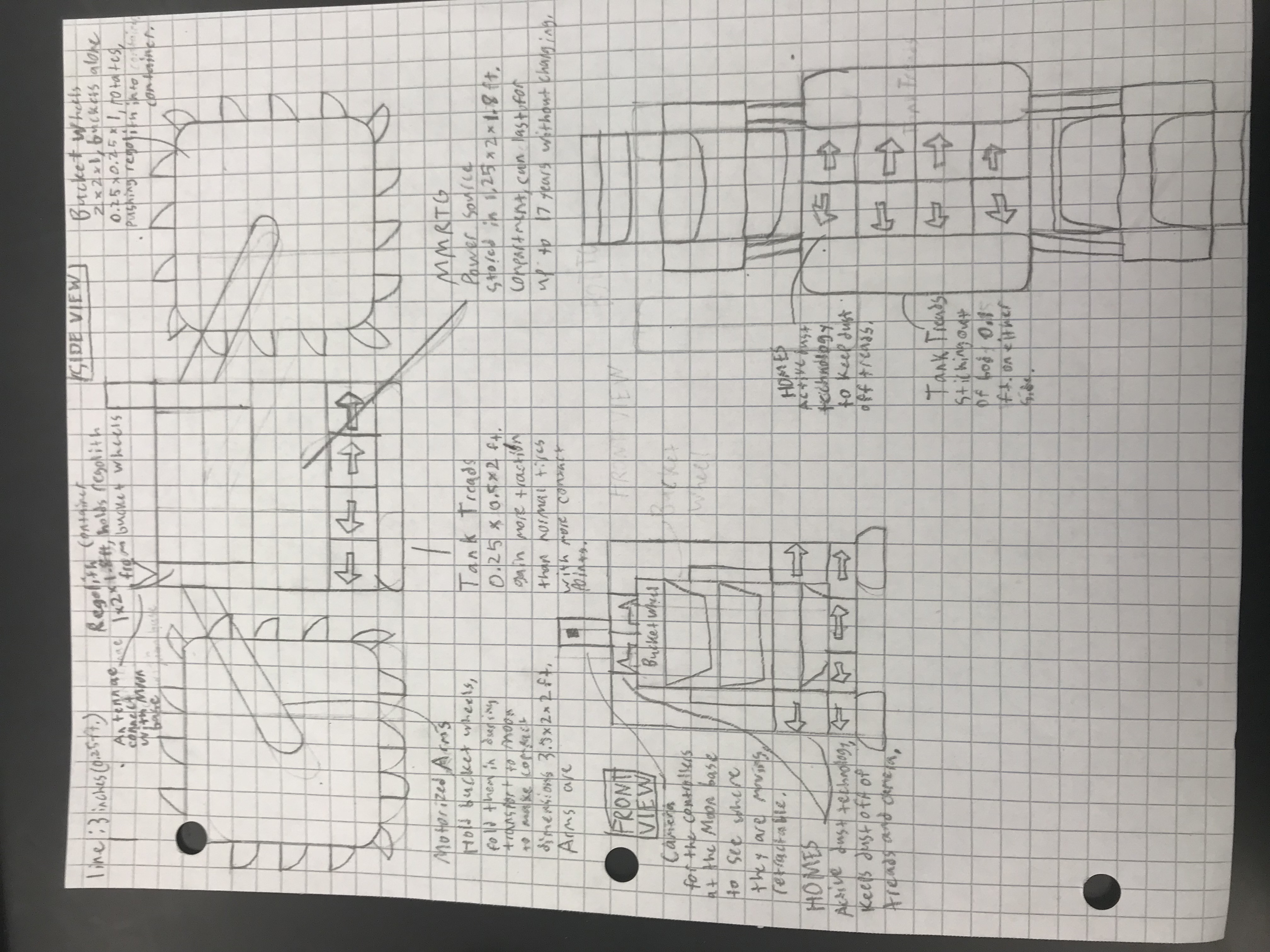
Billie Jean will be remotely controlled from the moon base using a camera at the front to show controllers the terrain. It will use an MMRTG for power and tank treads to move at walking speed and gain more traction with contact points. The robot will use two bucket wheels to harvest regolith from the front and back, dumping collected regolith into a container at the top it’s body. The bucket wheels will be connected to Billie Jean with motorized arms, which will fold the bucket wheels into the container, making it 3.5x2x2 feet in its most compact form. The bottom half of Billie Jean will have HOMES panels attached to it to keep lunar dust from sticking to the treads and will have panels near the camera to keep dust from blinding it. The robot will be symmetrical to maintain balance and will be made from aluminum alloy.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org