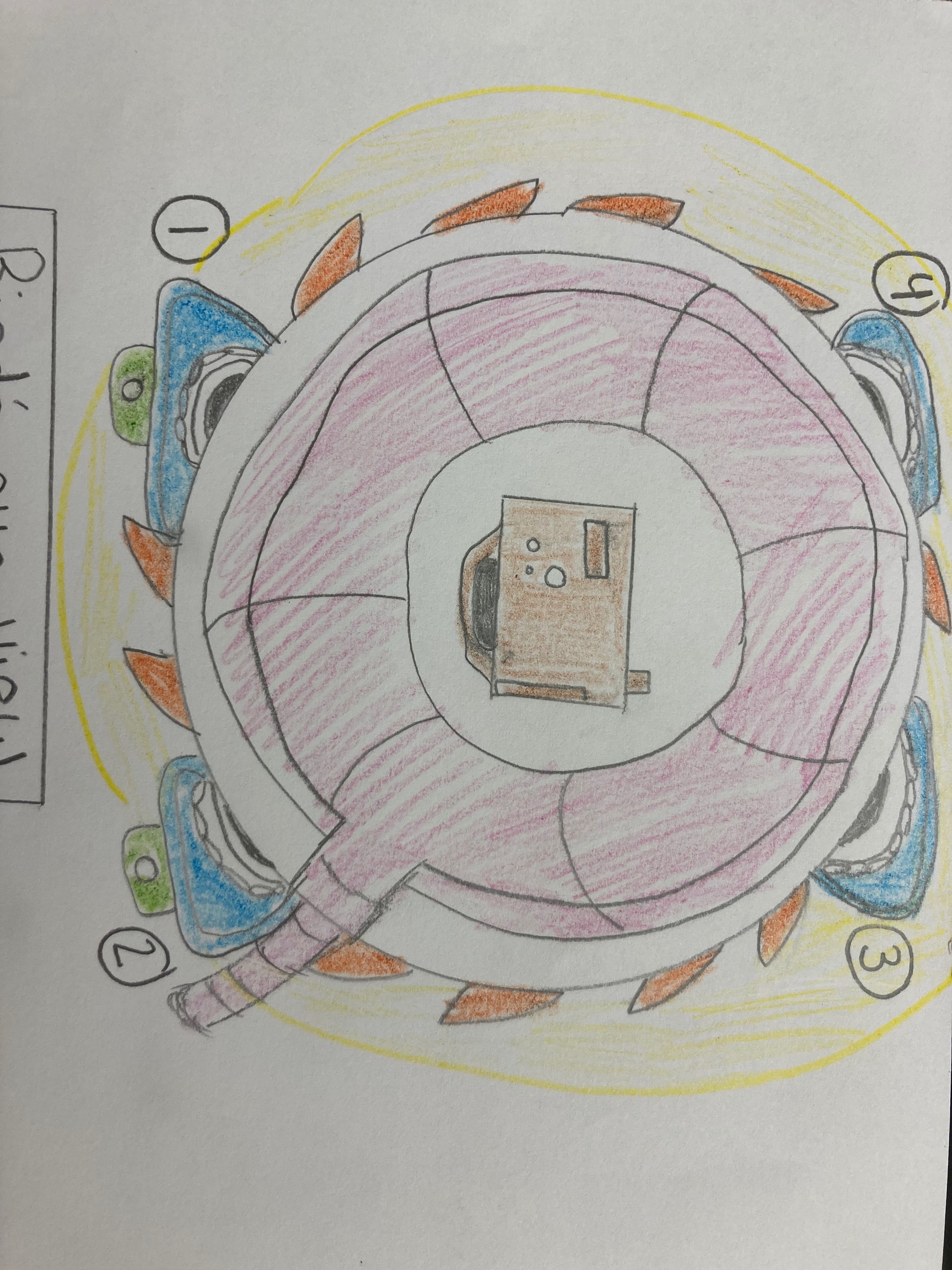
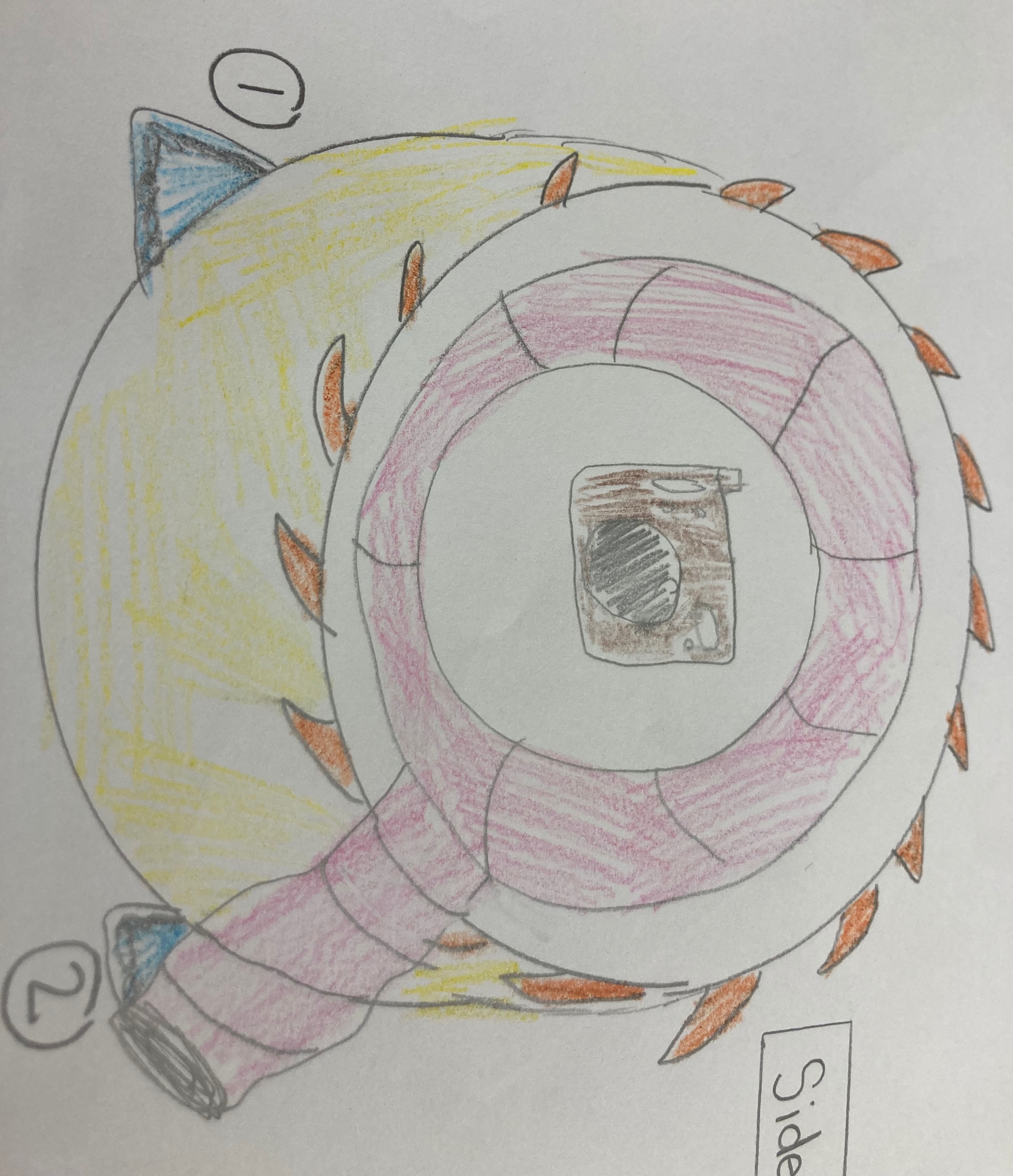
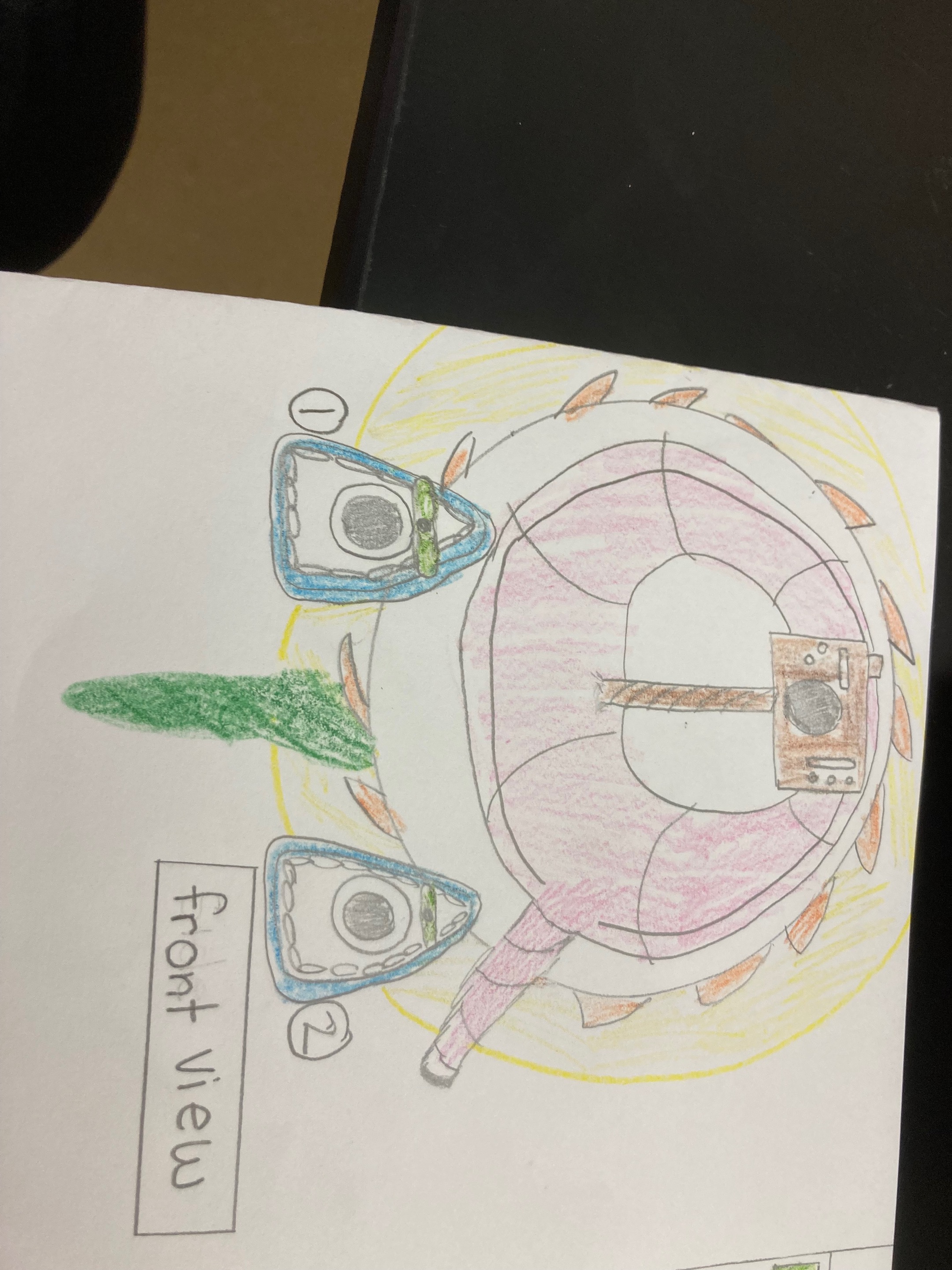
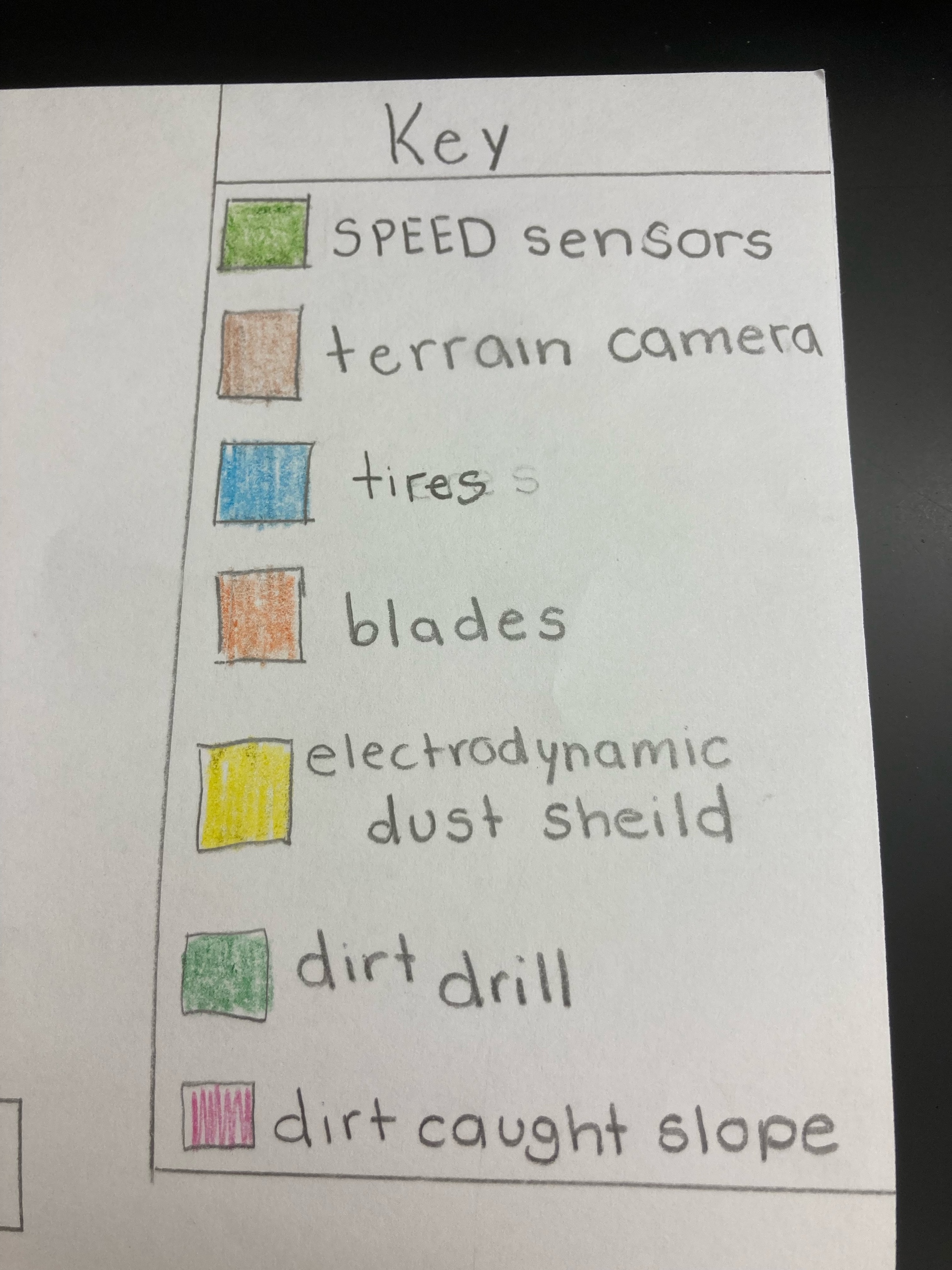
Encourage will be remote controlled, with a camera taking birds eye view photos of the terrain, coming up with different path options, then the image will be mirrored down on earth so the operator can control its movements stopping to recharge with the radioisotope PowerSource. My robot has two ways to dig up the lunar soil, titanium blades to help maintain a steady temperature in the harsh conditions and a drill at the bottom of the robot helping dig up soil from below. We’ve also added flexible wheels, which can change from circles to triangles to help maintain traction on the moon’s rough surface. Adjusting to the necessary speed is by sensors on the wheels and to help keep my robots balance, there is a drill on the bottom helping hold down the center of gravity. We’ve also added an electrodynamic shield covering the robot from any dust particles.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org