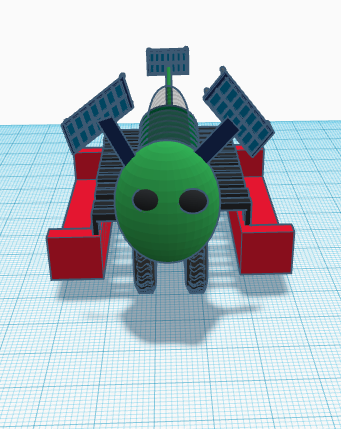
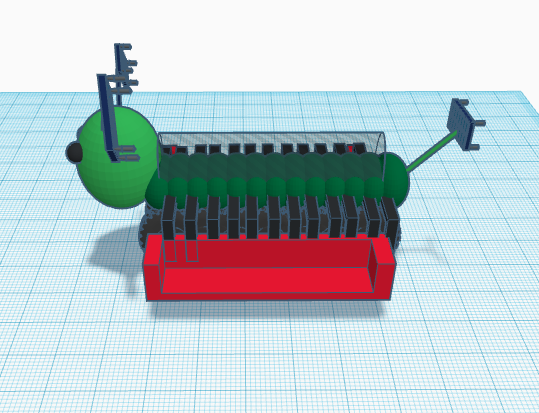
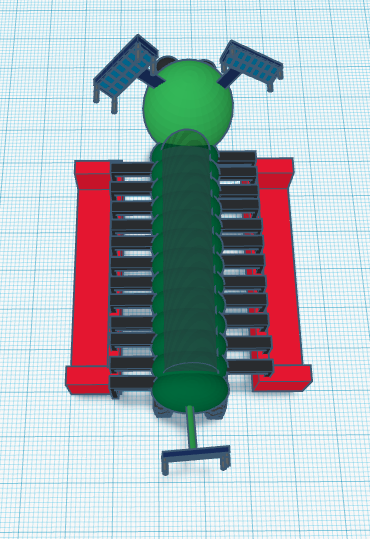
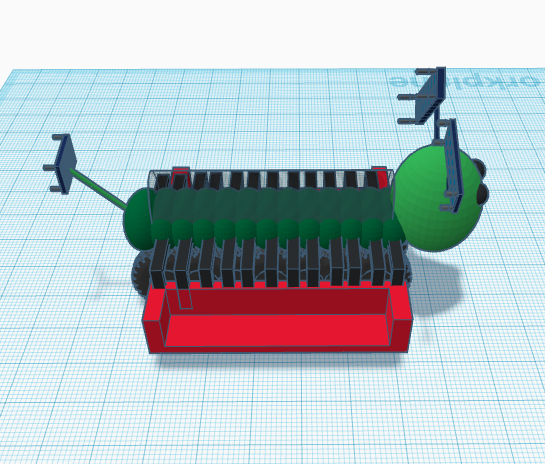
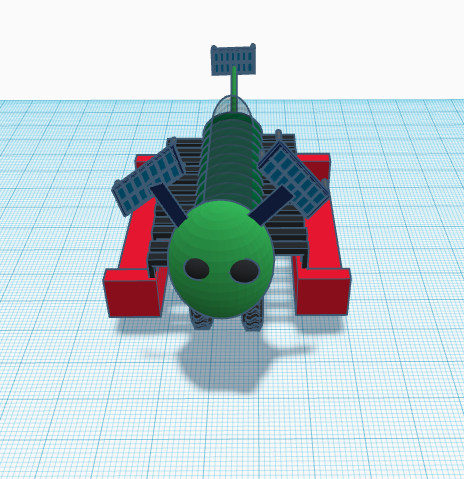
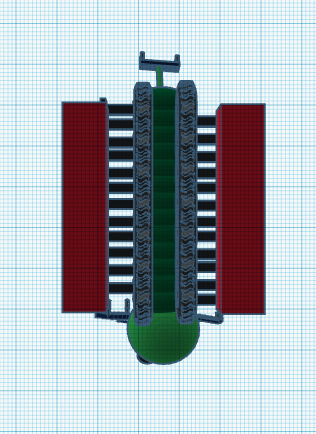
Lunapede resembles the shape of a centipede. This allows it to have extra legs to perform different tasks. Lunapede would be made out of stainless steel mesh, this creates an electric field around the robot to repel lunar dust. Additionally, Lunapede has two antennae solar panels and a tail panel for energy, the energy will be stored underneath the regolith storage area. The regolith storage area is the clear spherical bubble on top of the centipede. Lunapede’s legs are of a treadmill design, this will keep the rover securely on Mars. My rover will be going at differing speeds, it will go slow for trips to the excavation site, but come back to the base at a fast/normal speed. Lunapede is an autonomous rover, coordinates will help keep track of the drop-off and excavation sites. To handle extreme temperatures I will coat the rover with silica aerogel (3in thick).
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org