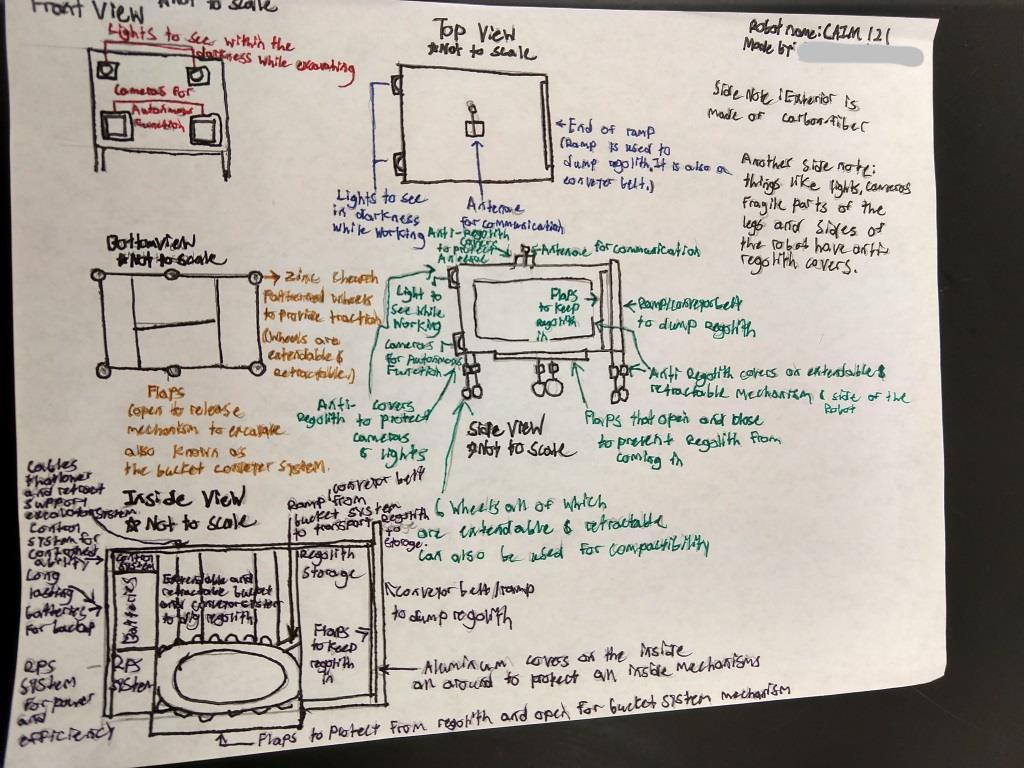
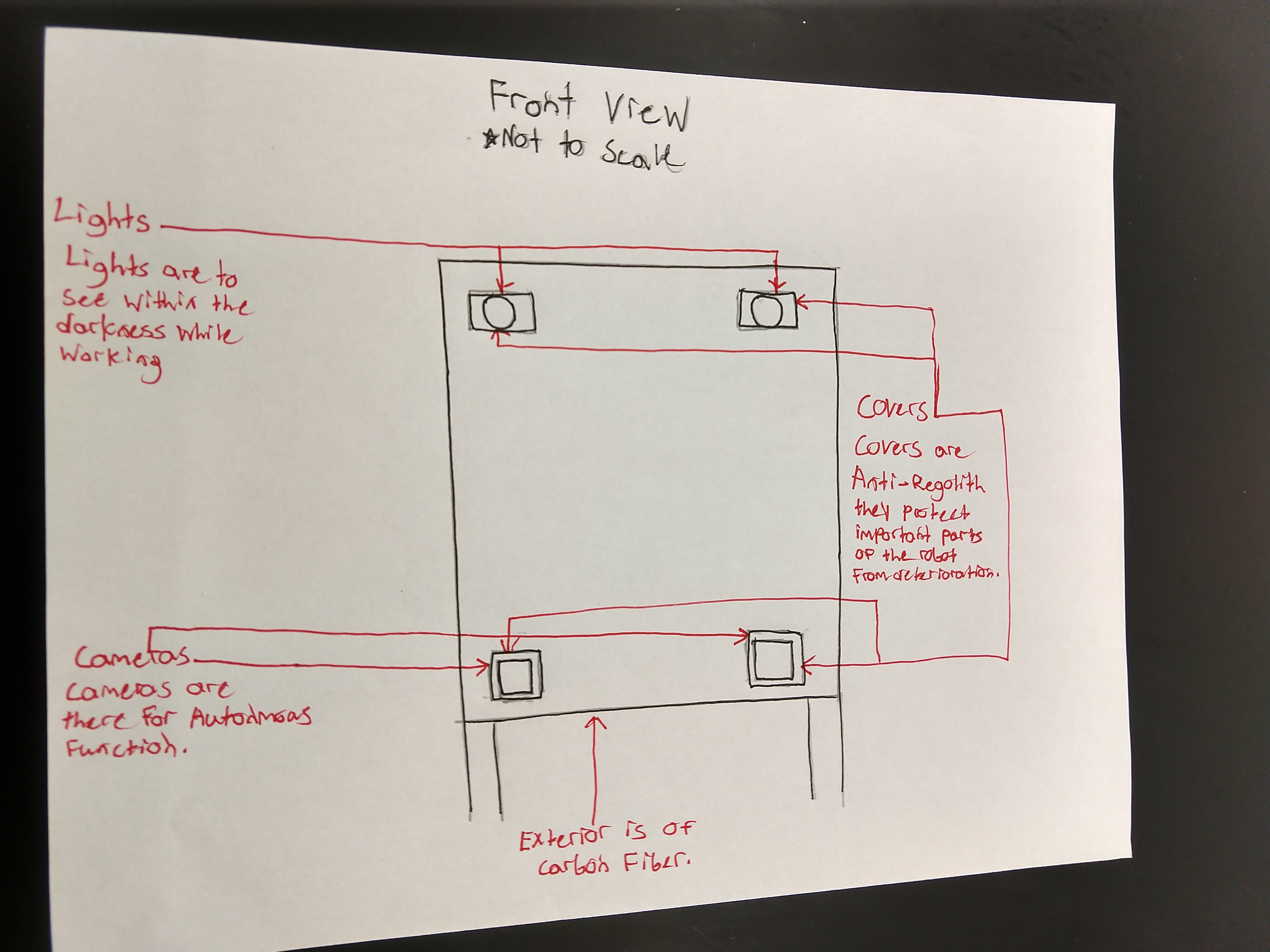
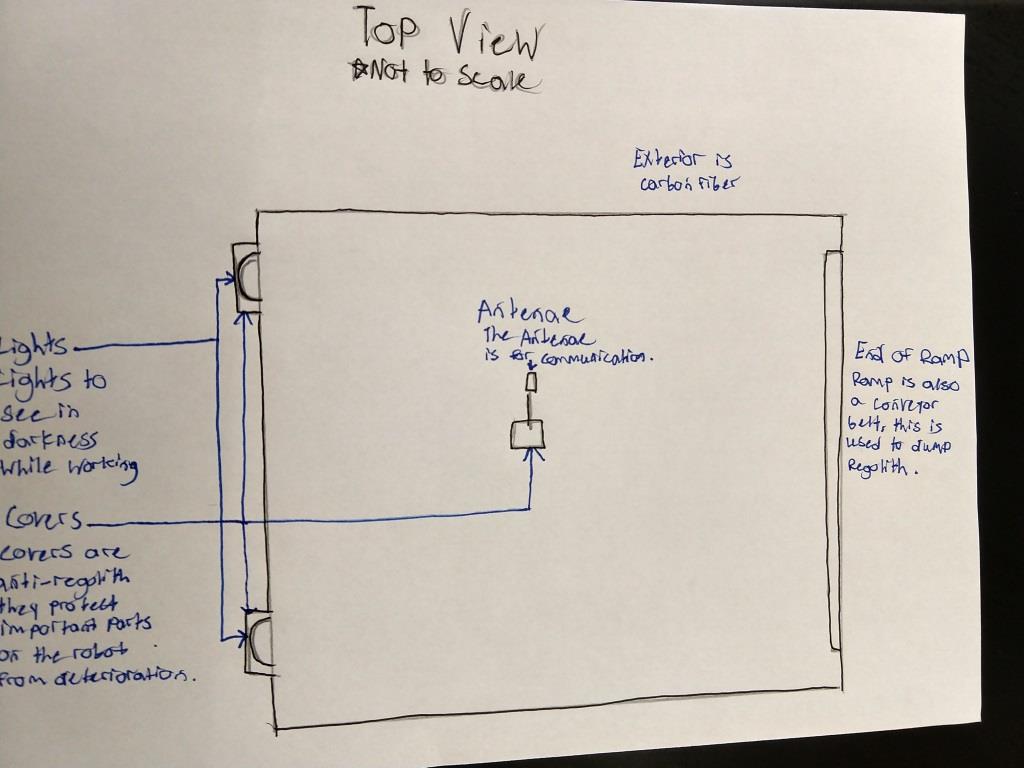
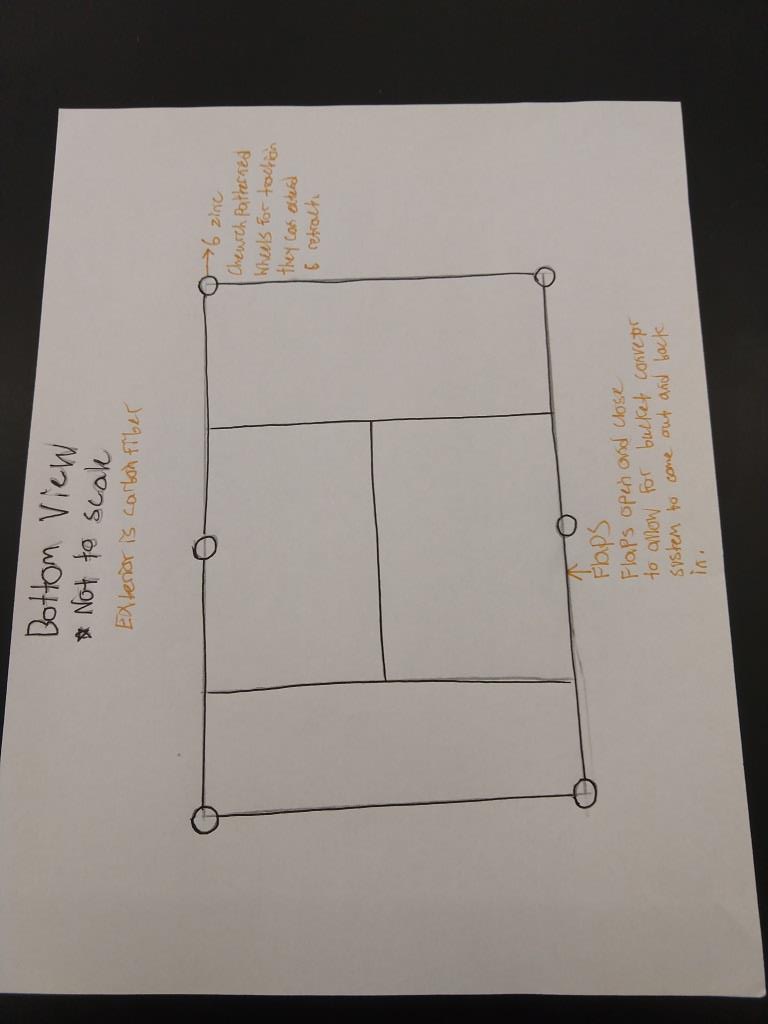
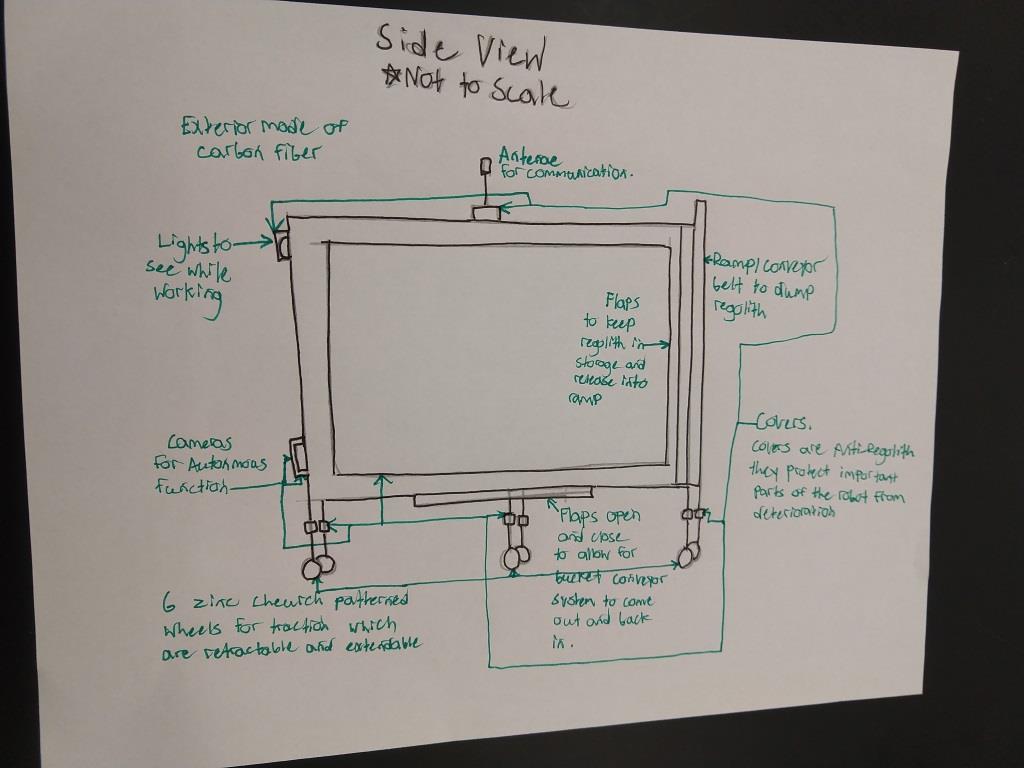
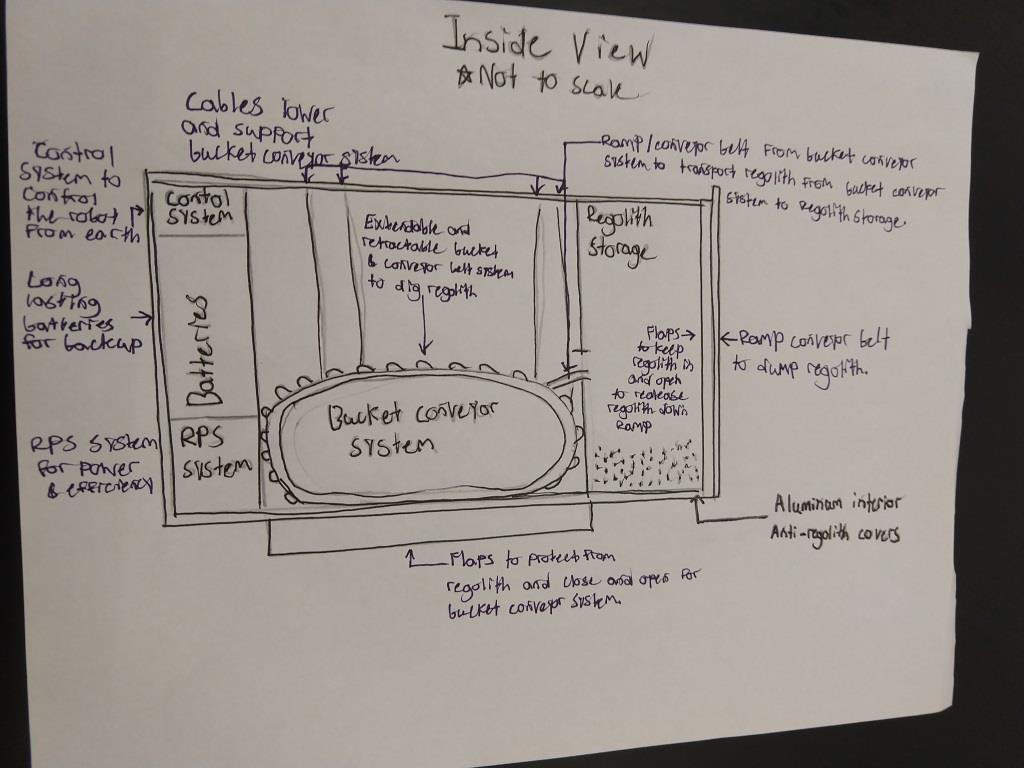
The operation of the Lunar robot is both autonomous and controlled. The power system used is RPS with long lasting batteries, The robot’s dimensions are 3.5ft x 2ft x 2ft in a rectangular shape. Its center of mass will be in the center. The robot will have varying speeds for certain situations, slow when digging and fast when empty or in movement. It will maintain traction by having 6 wheels made of zinc in a cheruch pattern, they will be medium size and weight. The robot will handle extreme temperatures by having an outside made of carbon fiber and inside of aluminum. The robot will handle dust by using covers (passive technology) by placing them on vital and fragile places. The robot will dig and excavate soil by using a bucket conveyor system. The conveyor system will transport the soil from the buckets into a storing portion within the robot.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org