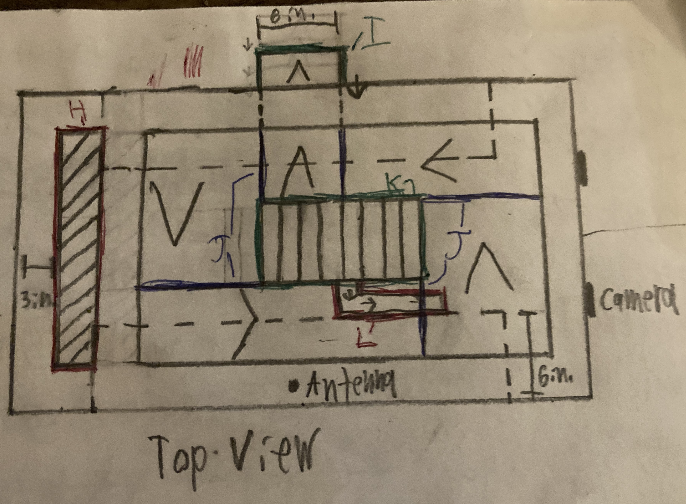
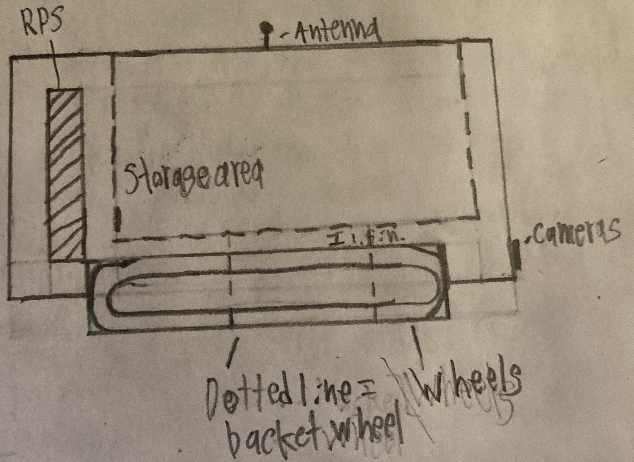
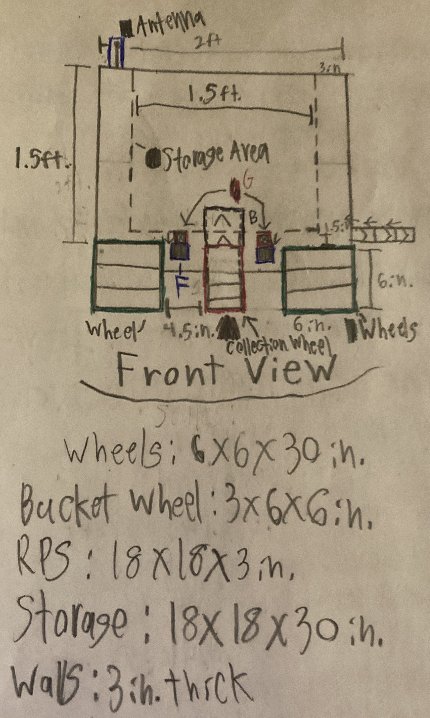
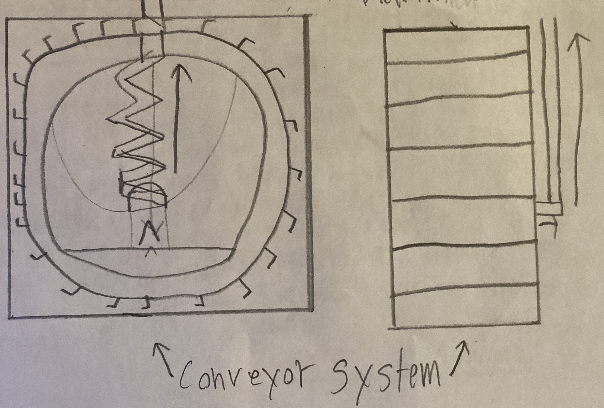
Selene is remotely controlled, from an earth or mars base, and it is powered by a modified, small Radio-Isotope Power System. The weight of the robot is distributed to balance exactly at its center point. Selene will be able to travel at 10-15 miles-per-hour, using steel chain-track wheels for traction. It uses a bucket wheel and conveyor system to excavate and move lunar regolith and has a large storage area in its center. The bucket wheel will be able to slightly extend or retract if needed to travel. Its surfaces will be very smooth to limit dust sticking to surfaces, and it will be coated in a non-stick coating as well. It will use a HOMES dust removal near more fragile parts such as the cameras. The walls and outside surface of the robot will be made out of tungsten, and the chain-track out of steel.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org