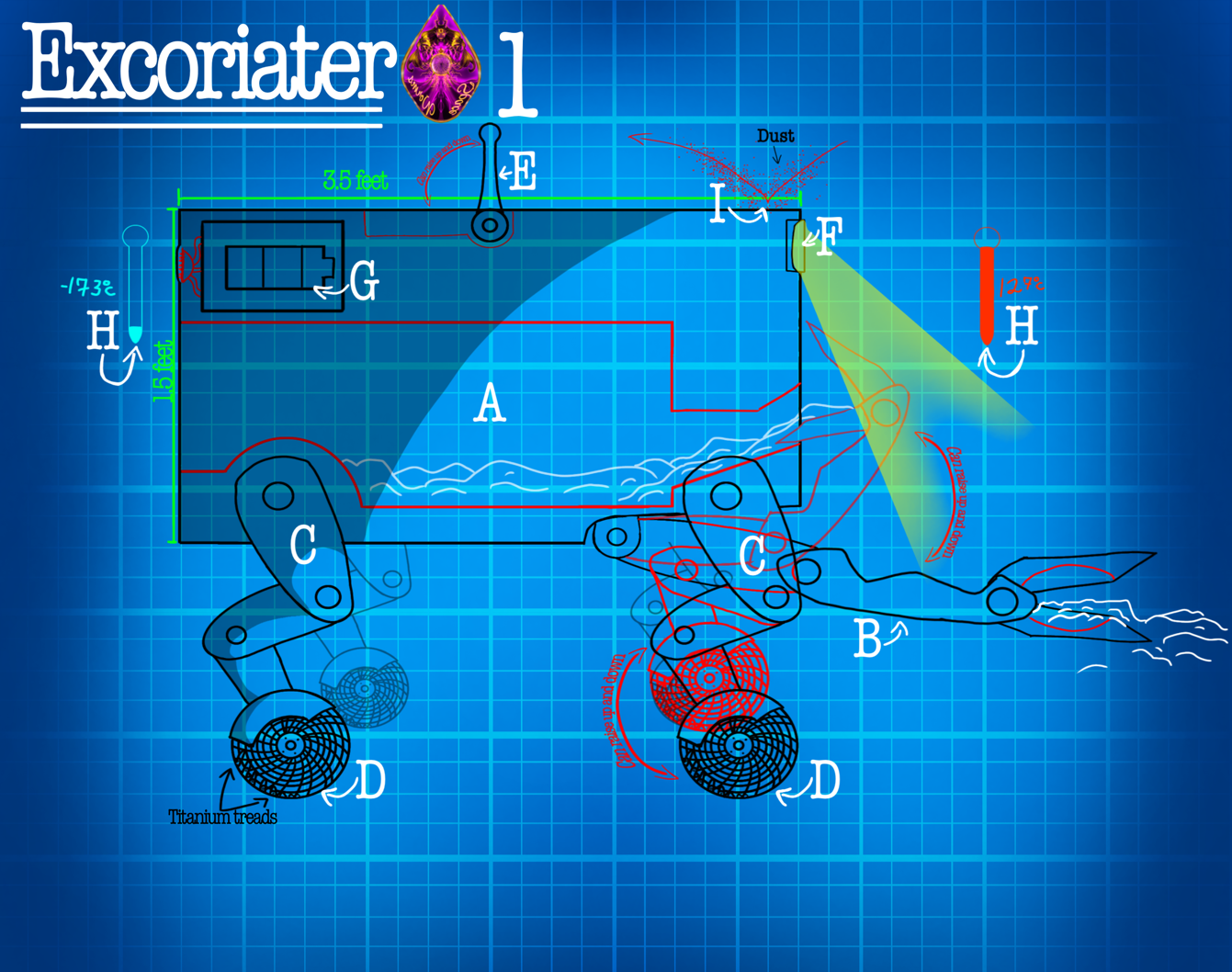
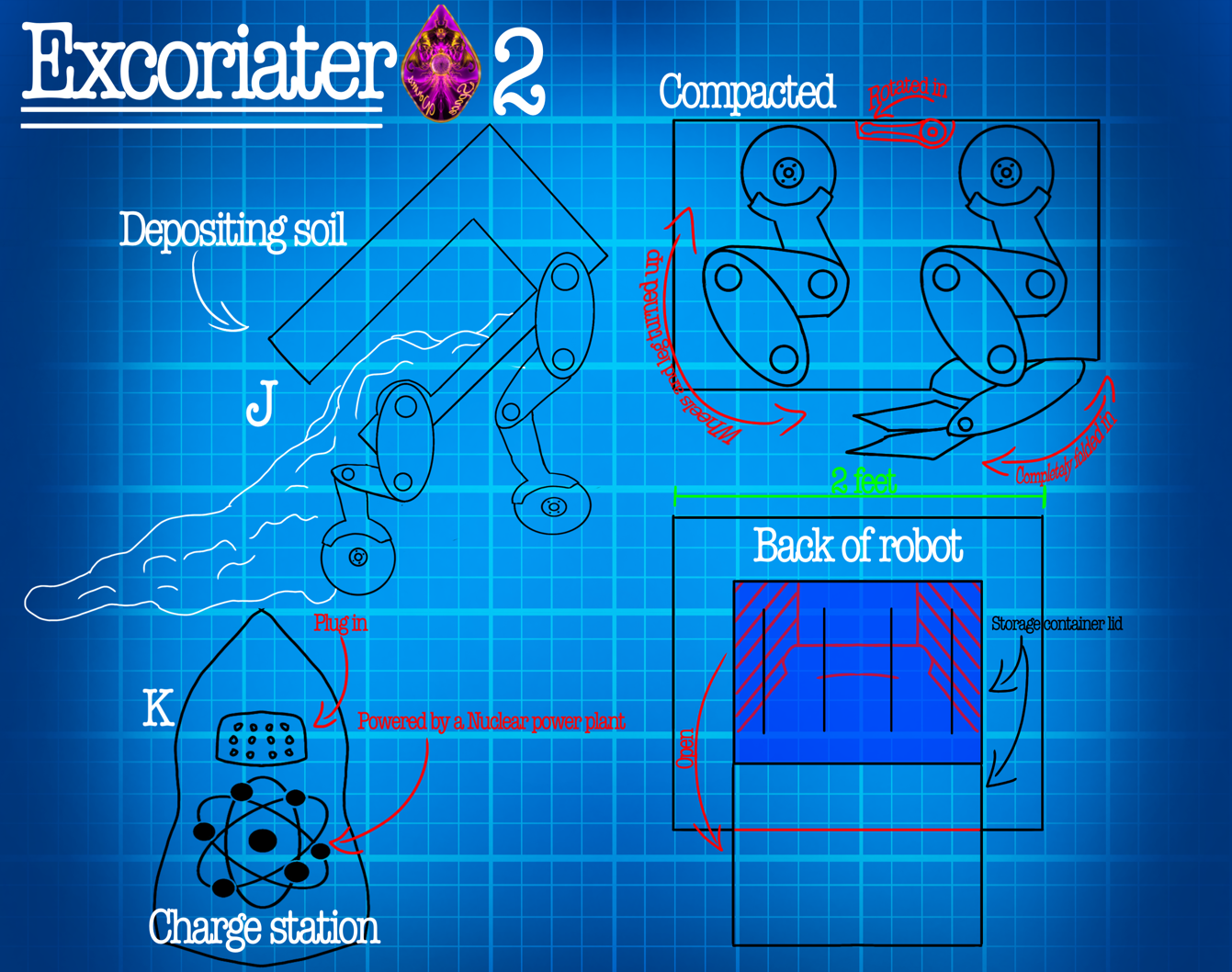
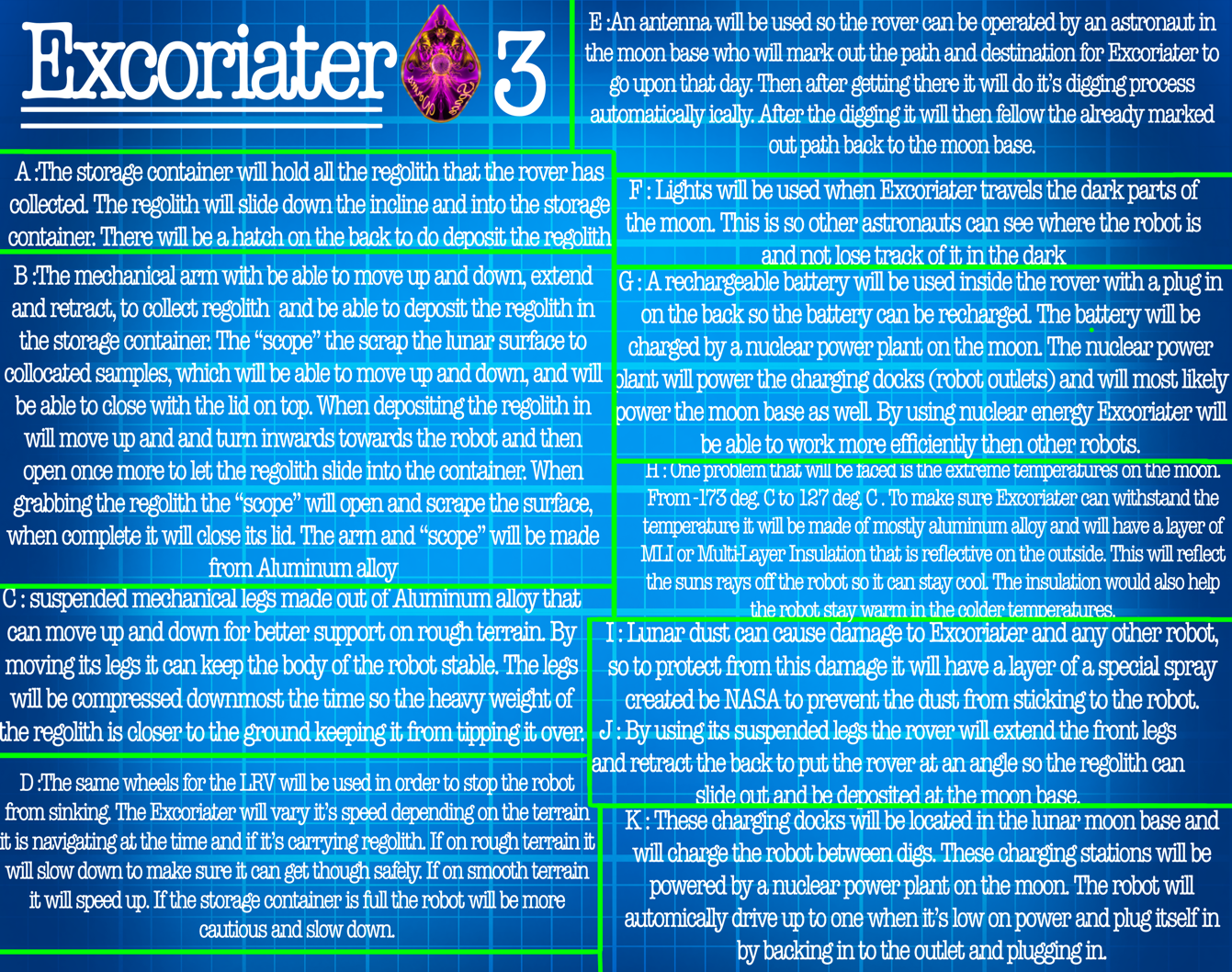
The robot design will be made out Aluminum with a layer of MLI or a Multi-Layer Insulation, that is reflective upon the outside. This will keep the robot content with the extreme temperatures. A layer of special spray created by NASA will be used to prevent dust from sticking and damaging the robot. Digging will be done with a hinged dust pan, it will scrap the top layer of the moons soil and move it to its storage container. To help with varying terrain. it will use the same wheels that were used on the LRV and vary its speed on terrain, this prevents sinking. Another thing, it will balance with suspended legs that change length depending on obstacles. It will use rechargeable battery’s recharged by a nuclear power plant on the moon. It will be both autonomous/controlled by an astronaut on the Moon Base.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org