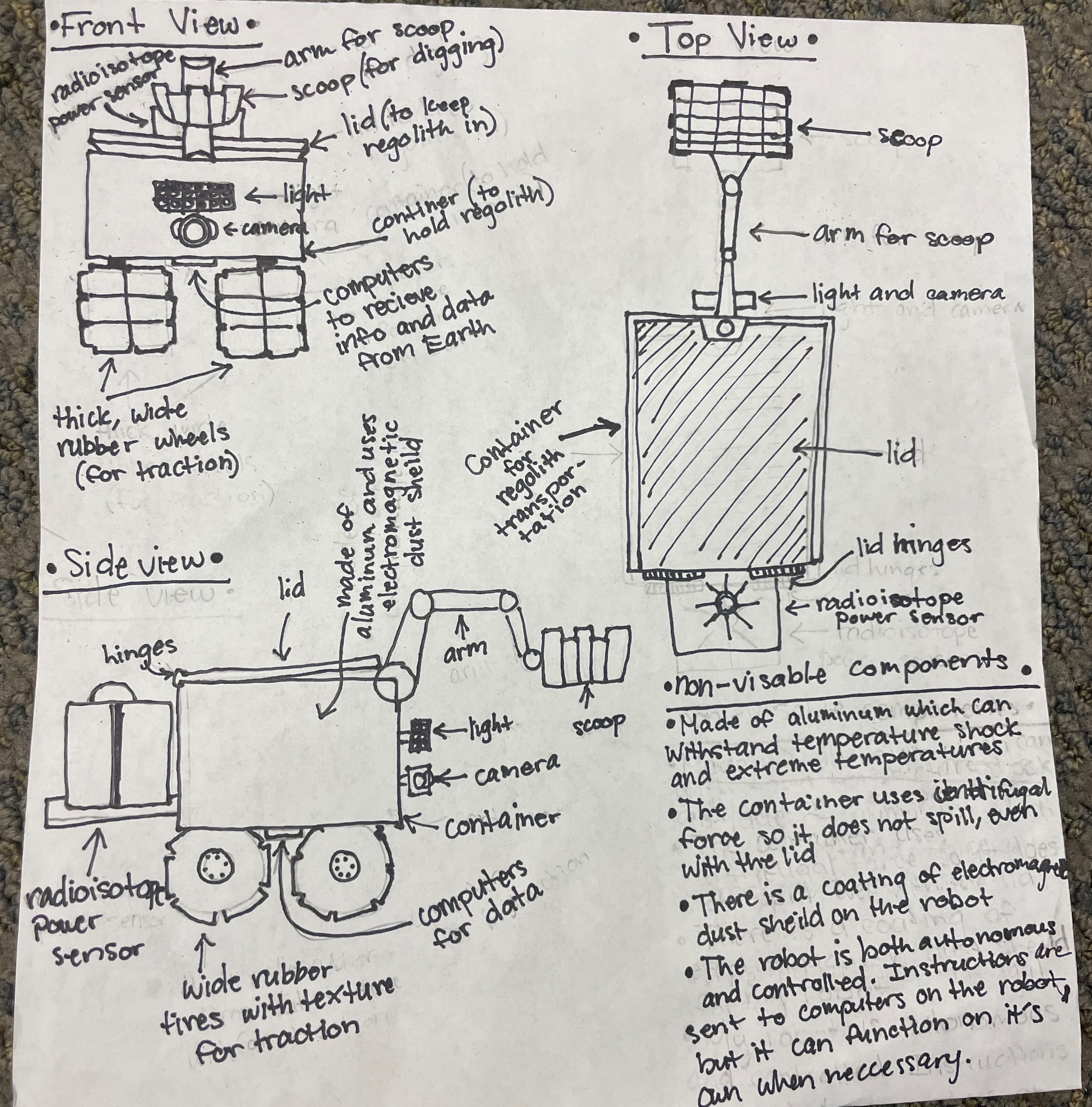
The robot will be both autonomous and remote controlled. Scientists will be directing from Earth and they will allow the robot to make its own choices when they feel comfortable. The robot will be powered using radioisotope power. The robot will go slower over uneven ground and faster uphill. The base will be very boxy and wide for balance. The robot will have wide and thick textured rubbery wheels for traction. The materials used will protect the robot from extreme temperatures (aluminum). The robot with use a passive dust technology: electrodynamic dust shield. The robot will dig the regolith using an arm with a scoop. It will put it in a container that holds the regolith (which will use centrifugal force for balance. There will also be a lid covering the top of the container). The robot will take trips transporting the regolith from container to container.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org