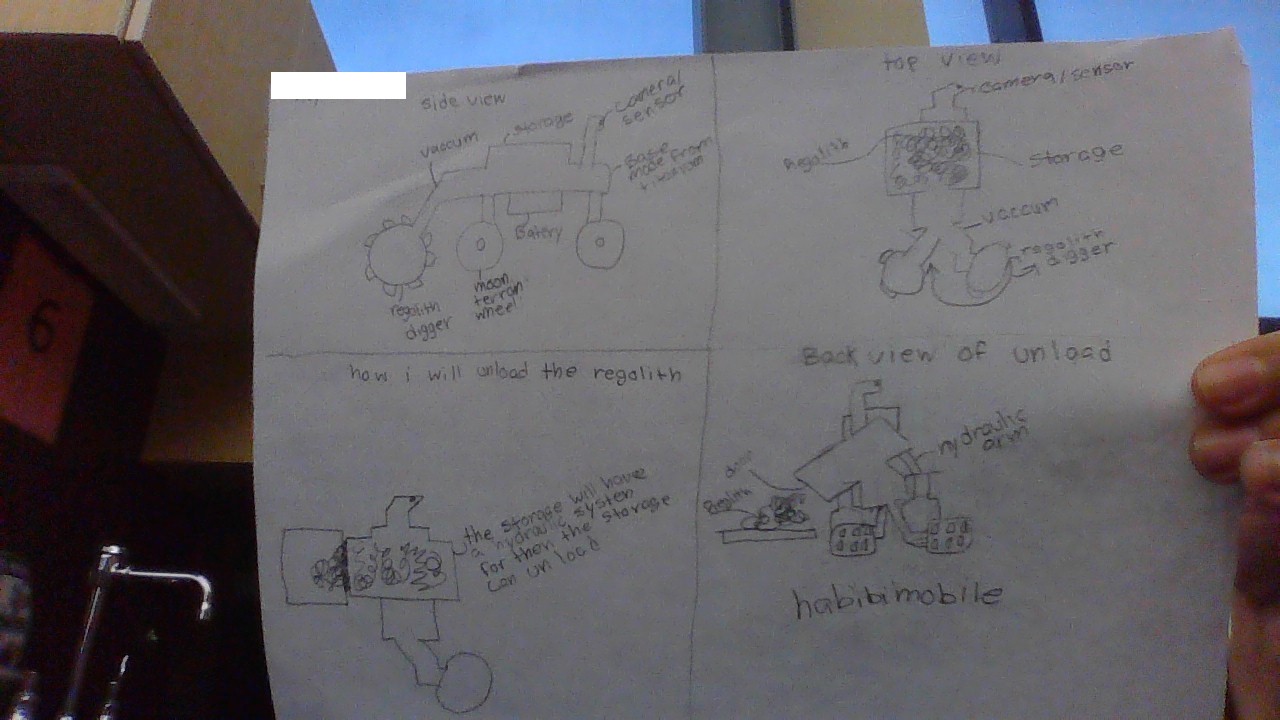
Habibimobile will be autonomous and remote-controlled because most of the time it will be autonomous but if it ever has trouble it will notify me and ill tell it what to do. habibimobile will be battery powered but the recharge station will be solar powered, habibimobile will be balanced because majority of the weight will be in the middle. The speed of habibimobile will be slow but the speed of the diggers will go in a fast pace. The robot will have a good traction because it will use wheels made for the moon regolith. habibimobile will be made from titanium because it can withstand extreme cold and hot temps. habibimobile will use passive dust technology like the electro dynamic technology
To make it dig the regolith I will use 2 buckets with scoopers. After the regolith enters the buckets it will be sucked up by vacuum into the storage.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org