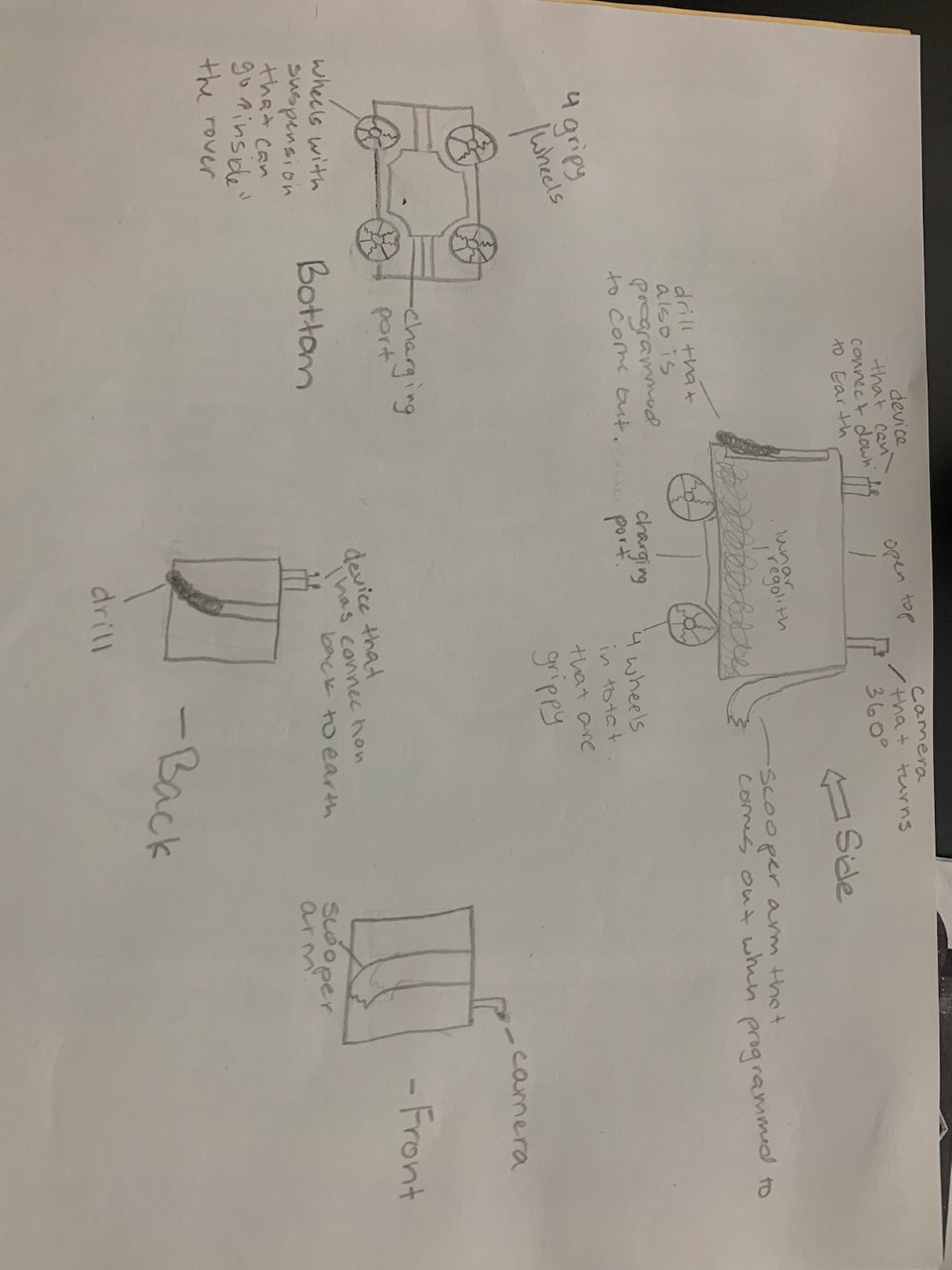
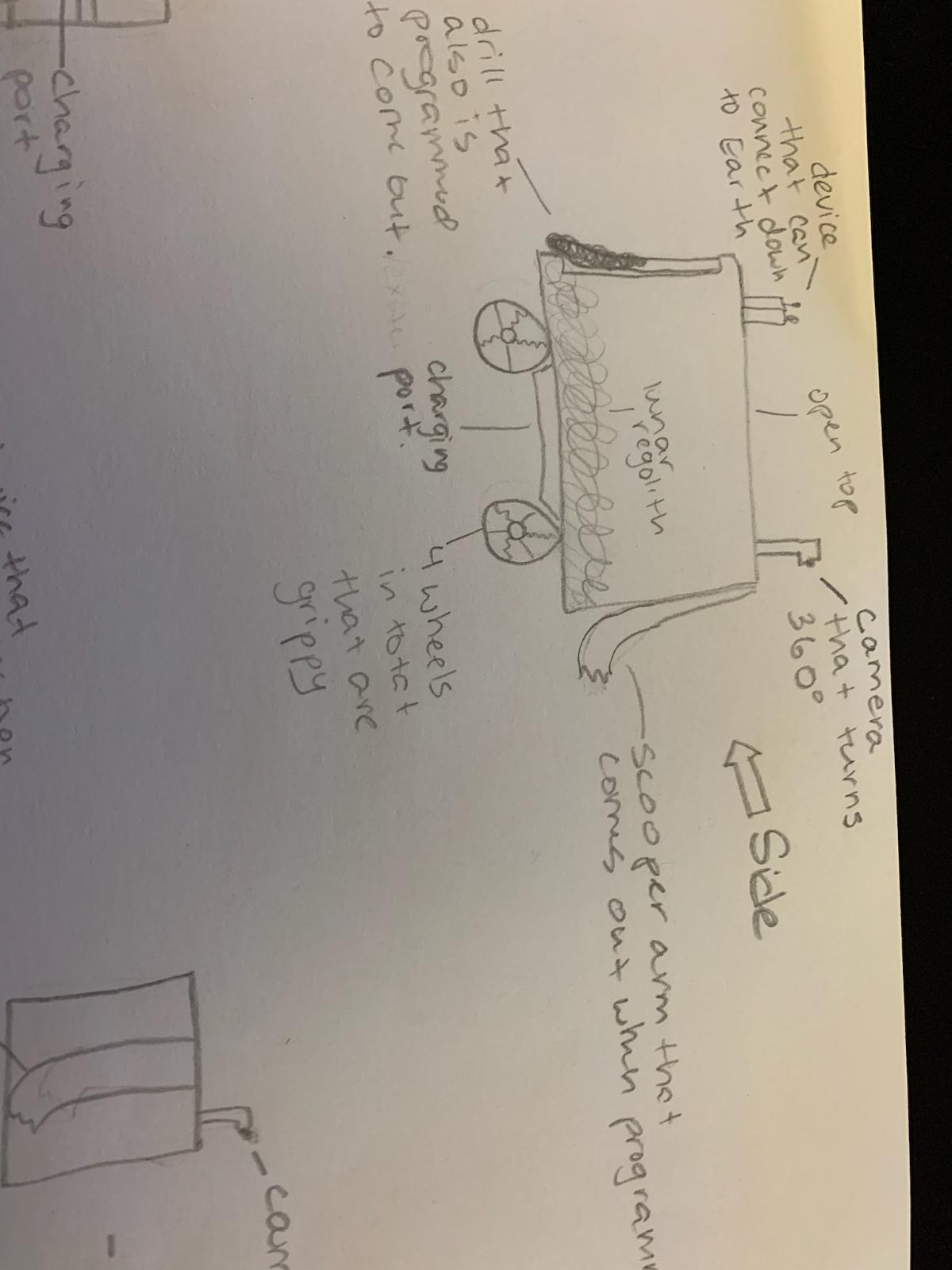
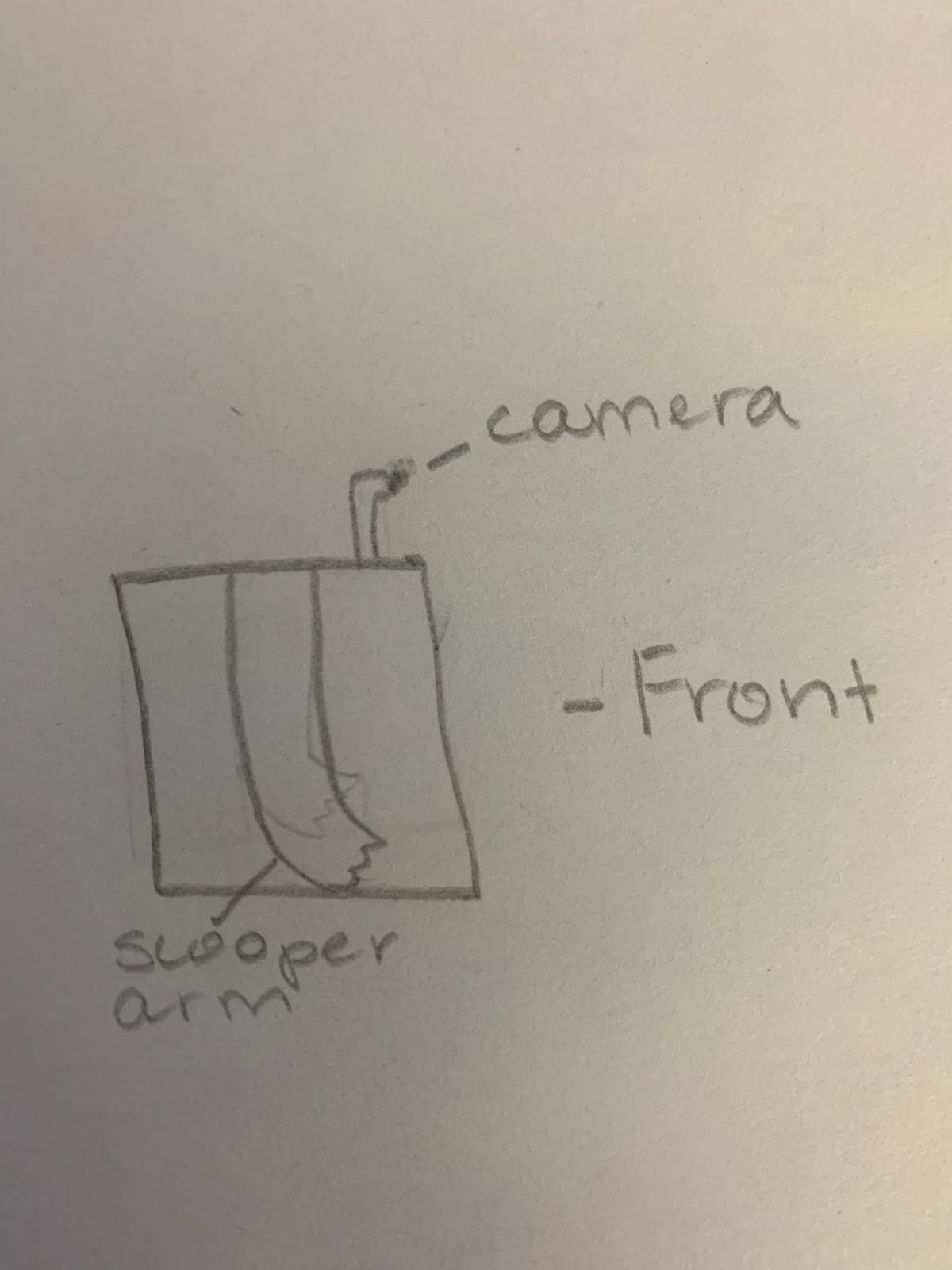
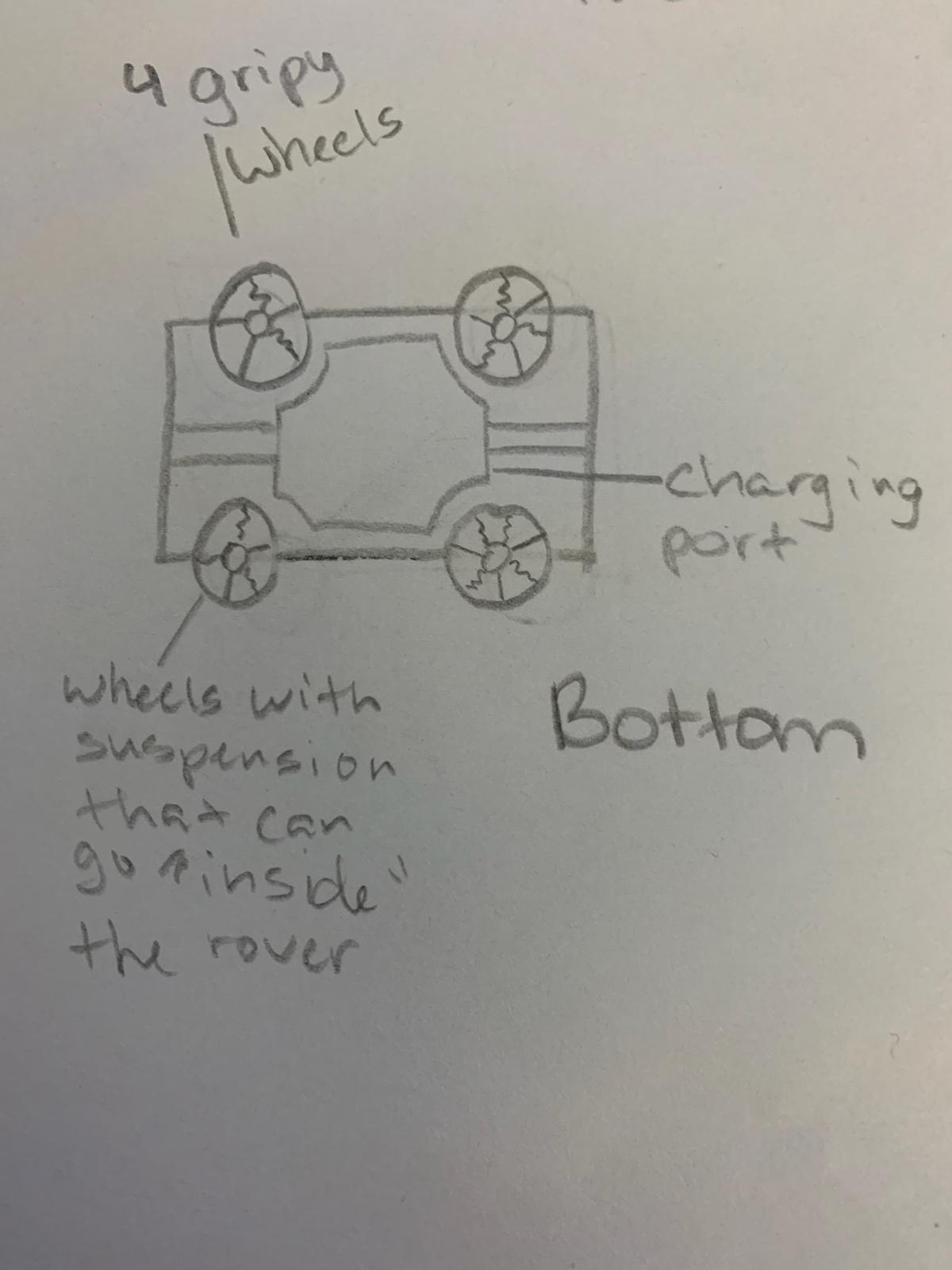
The DHKM360 is a lunar robot that is mostly remote controlled by an astronaut on the Moon but can be autonomous at times. It's power system is a radioisotope power system with solar panels used as backup. Soil stored in the center of the robot will keep the center of mass in the middle to maintain stability. It can move at varying speeds depending on the terrain. For traction, wheels with a pattern similar to Perseverance rover will be used with suspension to maintain stability. It will have Carbon based materials handle cold temperatures. To handle the dust, a cover/filter with repelling paint will protect the vital parts, along with wipers. It will excavate using a scoop/claw in the front and a "drill" in the back. When programed, it will drill to slowly drill into the soil and then turn around to scoop it up, then repeat.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org