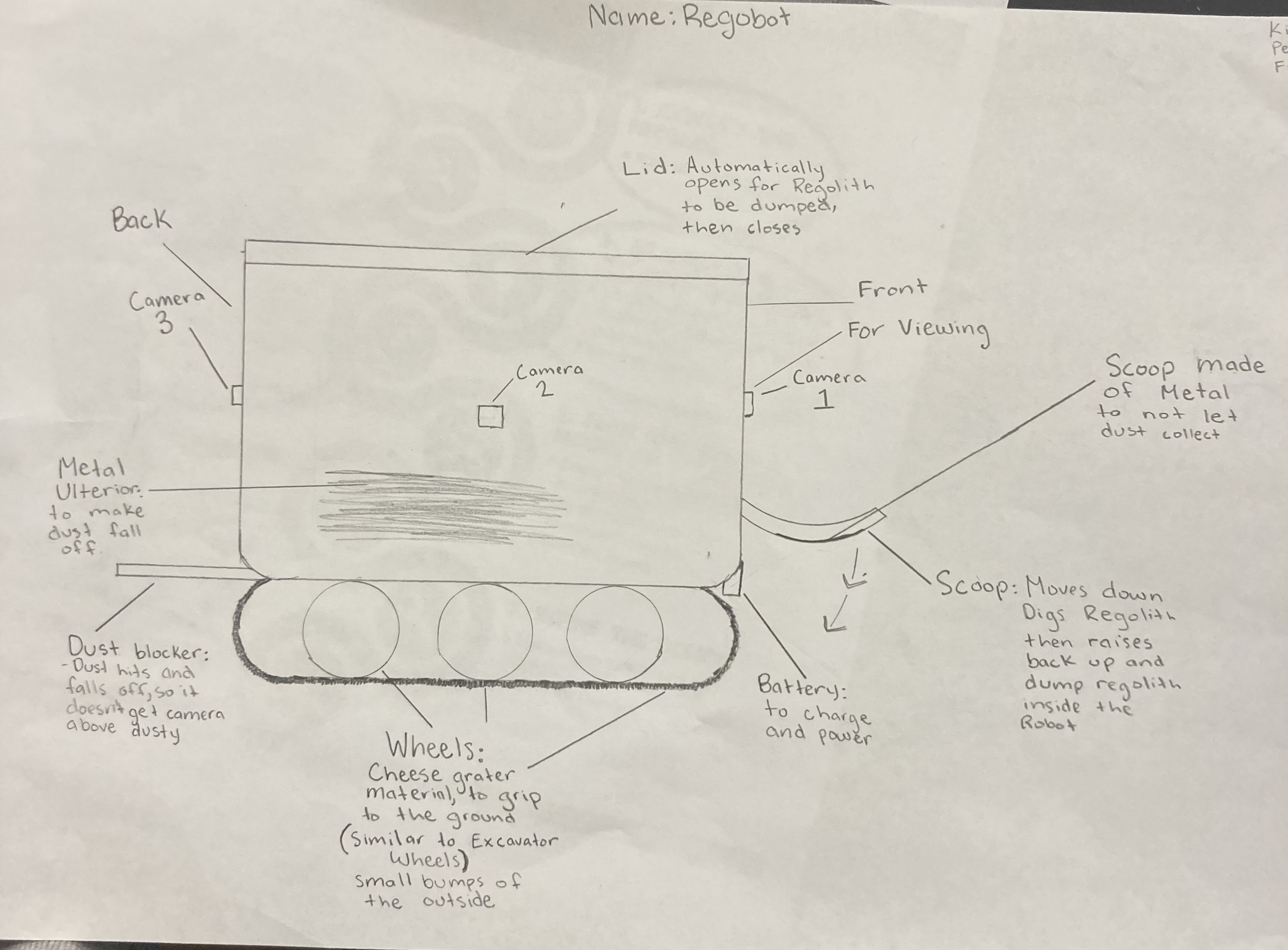
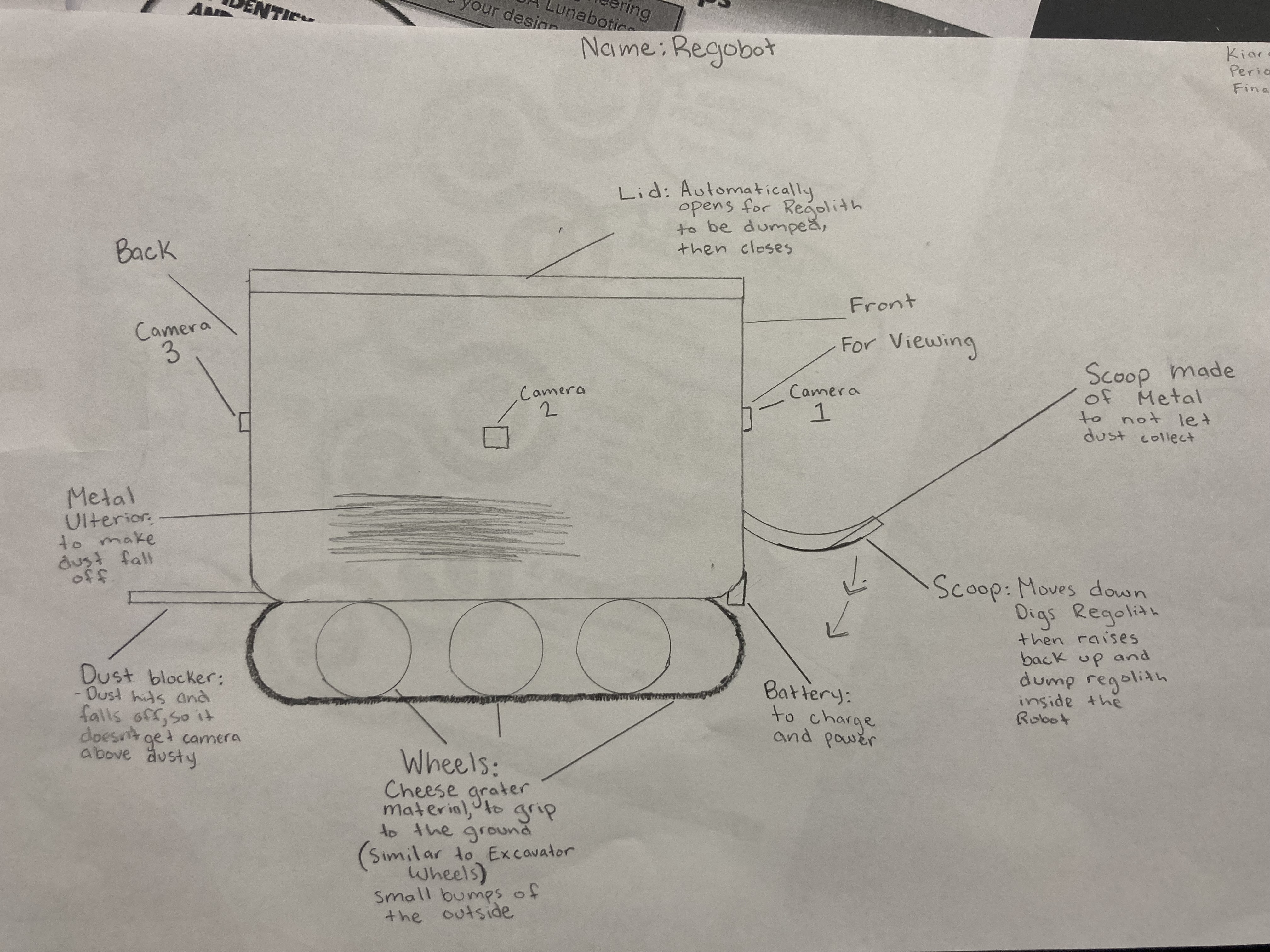
The robot will be remotely controlled by an astronaut on the moon. There will be a power port to charge the battery on Regobot. The robot will have an even amount of weight on all sides and when the lunar soil is added it will be dumped into the center of the robot keeping the weight evened out. Regobot will have the ability to vary speeds, depending on the rought it takes. It will have circular wheels with small holes and bumps for grip. The robot will be made of carbon-based metals. So, it does not melt in hot temperatures. The robot will use a passive dust technique. A platform sticking out on the back blocking the dust from the cameras. Regobot will collect lunar regolith by using the scoop located on the front. It will lower, scoop, then raise up and dump inside, after the lid automatically opens.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org