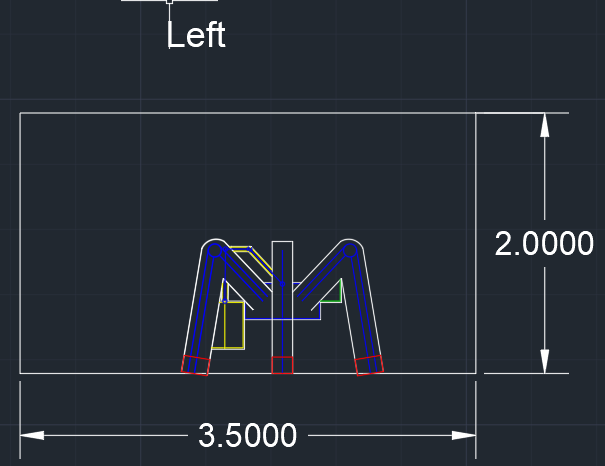
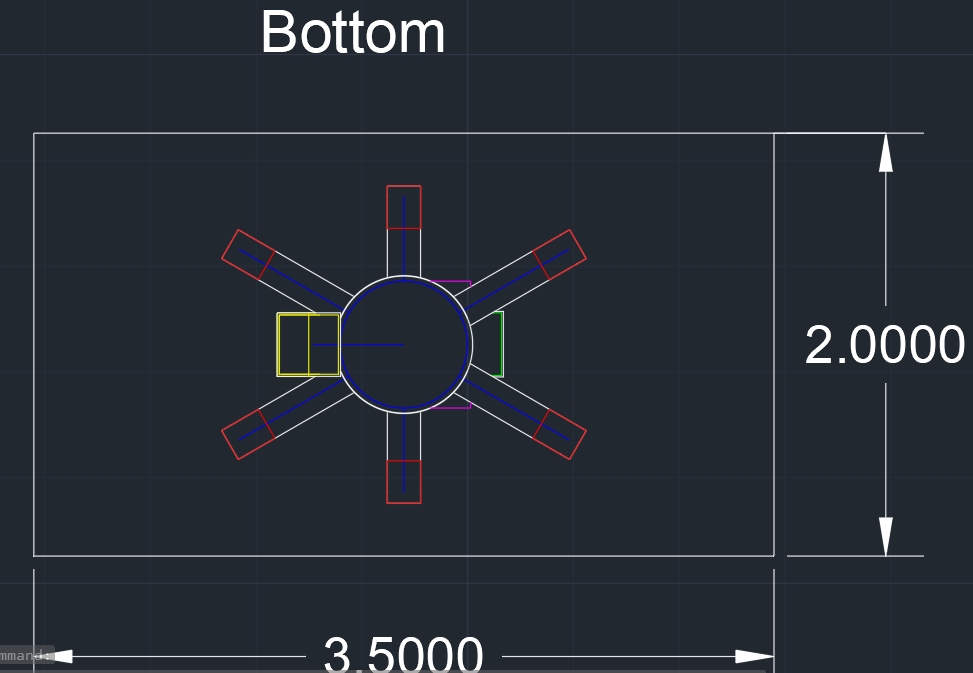
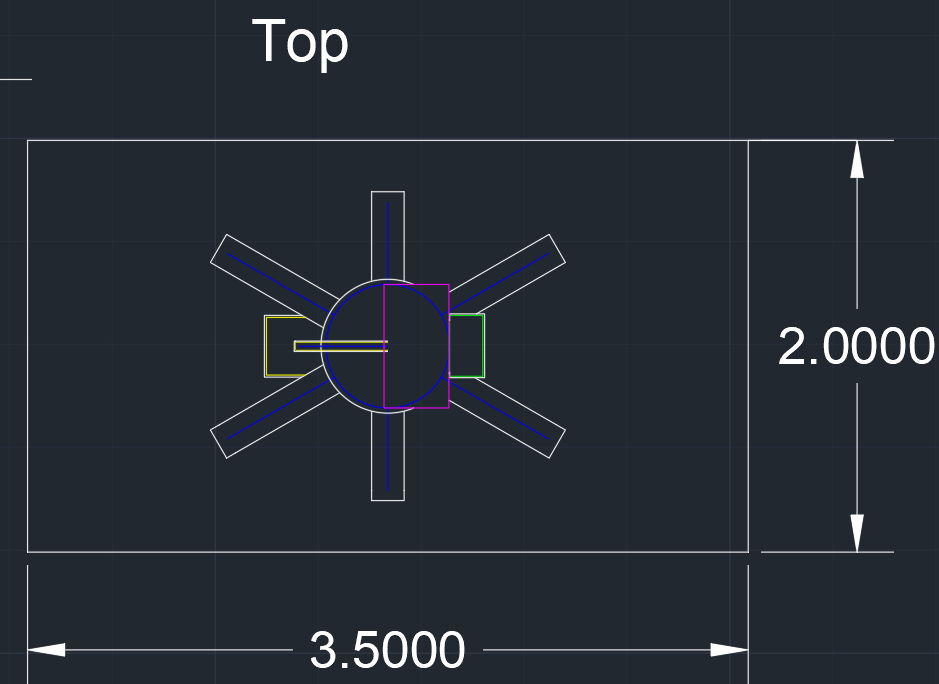
When designing my rover, I decided to opt for a design capable of maneuvering in soft dirt and over rocks. I also designed it to withstand having dust gather on its surface.
To accomplish this by designing it to be a six-legged "walker" robot. The rover is made of two major layers, an inner, moving, mechanical skeleton, and an outer, flexible, protective layer.
The outer layer covers the whole rover (except for the solar panels) and protects it from having dust get caught in the moving parts.
To gather soil, the rover has a claw attached to a mechanical arm.
I created the design in the AutoCAD software. Each major part is color coded as follows:
White: Outer, protective layer
Blue: Inner, moving skeleton
Yellow: Digging claw
Red: Reinforced covers on the foot of each leg to prevent tearing
Green: Power Cell
Pink: Solar Panel
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org